��ժҪ��Ԕ������MAGNETܛ����ϡ������늙C�M�ЄӑB�����о��������Y���c늙C�Ĝyԇ�Y���M�б��^���yԇ�Y������������Ч���c�yԇ�Y�����^�Ǻϡ�
�����P�I�~���ӑB���棻ϡ������늄әC��MAGNETܛ�����yԇ�� ��ܛ���dz��õ�һ�N����ܛ�����Ќ��T��늙C����ģ�K����늙C�����о��У�����P1c���ơ�ģ�����Ƶȿ��Ʒ��������ڌ���������ϵ�y���о������ǣ�Matlabܛ�������P늙C���c�ķ����о��r���ѽ��o�ε�Ҏ����һ��ǰ�ᣬ�Ǿ���늙C�ĸ��N��������֪�ģ�������늙C���w�M���о��r���˕r늙C�����P����δ֪����Magnetܛ���ǻ���늴ň�����Ļ��A֮�ρ��M��늙C�ĄӑB����ģ�ͨ�^늙C�ĄӑB���棬�Ķ����Ԍ�늙C�������M���A�У��Mһ����늙C���Ʒ����M�и��ƣ��@�ӿ��Թ�ʡ늙C�������ڡ�
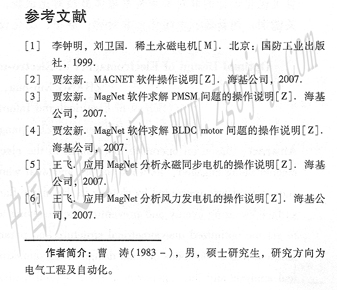
����ܛ����������ܛ��֧�����ڷ���ؓ�d�c�ӵ��·��ģ�����Ԍ�늙C�ĄӑB�����M�з��档���ڰ��Ռ��H�ߴ罨ģ�����Ҳ����c���H�����������Ȳ��ň��c늙C���挍��r��һ�£��@����늴ň������Ļ��A֮���M��늙C�ӑB���棬�������挍�ԡ�Magnetܛ���Ļ����������E��һ�������ԪcAEܛ������ƣ���һ���Ŀ�ķ��������������̣�Ҋ�D1��
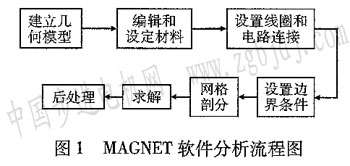
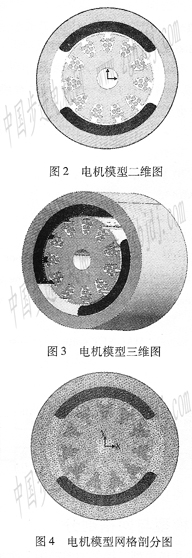
������ģ���c�W���ʷֽ����Ď�ģ�Ͷ��S����D��D2��ʾ�����S���w�D��D3��ʾ���ĈD�п��Կ�����늘����ѽ����˾�Ȧ����Ȧ������Ҫ����Ȧ�O�������ą������猧���Ľ���e�͌��������ȡ���ģ��ɺ�Ҫ��ģ���M�оW���ʷ֡��W���ʷ����M���Mһ��Ӌ���ǰ�ᡣ�W���ʷֵĴ�СӰ푵�Ӌ��Y���ľ��ȣ�ҲӰ푵�Ӌ��ĕr�g�L�̣��Ķ�Ӱ푵�Ӌ��C�YԴ�ĺ������á�һ�����ܛ���Ԅ��ʷ֣����ʷֽY�����M��r�����˹��O���M�����ʷ֡�
������늙C��ģ�;W���ʷֈD��4��ʾ��
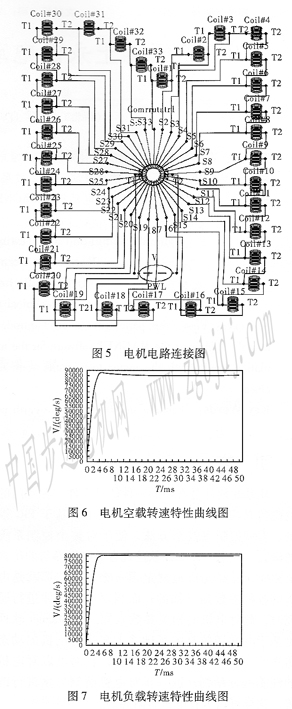
����늙C�@�M�B���·��늙C����ˢ����ֱ��늙C��늙C����·���Σ�����ˢ늙C���˓Q�֡�Magnetܛ���ṩ��һ���Q����ģ�K��ͨ�^ݔ��Q����Ƭ�����Q��Ƭ�ߴ���Ԅ����ɣ�ͬ�ӿ���ͨ�^�O���ˢ���������ˢ���Ѿ�Ȧ�c�Q�������@����ʽ�B�ӣ��ٰ��Դ���M�·��늙C�·�B�ӈD��D5��ʾ��
����4.늙C�ӑB����Y���c�yԇ�Y������
����늙C�ĄӑB�����о�����Ҫ�nj�늙C�ęCе�����M�з����о����քe��늙C�Ŀ��d�D�����Ժ�ؓ�d�D�������������о����D6��늙C�Ŀ��d�D�����������D���D7��늙C��ؓ�d�D�����������D���D8��늙C�yԇ�Cе���������D����l��Cе���Ԝyԇ������
�����ĈD6�п��Կ�����늙C�_��****�D�ٕr���õĕr�gT=5 ms��늄әC���d����˲��****�D�ٿ��_��nmax��9000Odeg/s��15000r/min����T��r늙C�_ʼ�\��ƽ����늙C�\��ƽ���r�D�١�85000deg/s��14 116 r��min����늙C�OӋָ���~���D�ٞ�nN=14 500(��l000)r��min���F�ڿ��d�D�ٸ����~��ؓ�d�D�٣��f���OӋ���^������
�����ڼ��~��ؓ�d����r��늙C�M�ЄӑB���档
�����ĈD7���Կ�����늙C�_��****�D�ٕr���õĕr�g��6 ms��늄әCؓ�d���ӵ�˲�g����****�D�ٿ��_��nmax��8100Odeg/s��13500r/min������Y�����Դ_��늙C�����ӕr�g�ஔС������Ѹ�١�늙C��T���10 ms�r�_ʼ�\��ƽ������늙C�\��ƽ���r�D��n��80deg/s��13300r��minͨ�^����Y������Ӌ�����늙C���D�ٽ���n=no-nN=816r�����D�ٽ����^���f��늙C�ęCе���Բ���Ӳ��ʹ��ؓ�d�r�D���^�ͣ���ָ���е��~���D�٣�min����1 200r��min����Ҳ������ָ�˷�������������Ҫ���C늙C��ؓ�d�D�ٲ���̫�ͣ�ֻ�����Ӵ��䓵����ԣ������늙C�ęCе���ԡ�
����Ȼ�������������ԣ�늙C���d�r�D���֕��½���
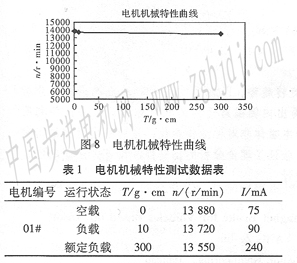
�����ı�1��Ҋ���d�r�D�ٵ��ڷ���Y�������~��ؓ�d�r��늙C�D���c����Y��ʮ�ֵĽӽ���ͨ�^Ӌ��늙C���D�ٽ���n01=nmһnNl=330 r��min���c����Y�����^��늙C�~��ؓ�d�r늙C�D�ٽ��ͱ��^С����Ҋ�Cе�����^Ӳ��
����С�Y��늙C�M�ЄӑB�����о������Լӿ�늙C�����M�̣�ʹ���Ƹ����п��AҊ�ԡ����ǣ�늙C����һ���ӑB�Č��������������ܵ�늙C�Y������䓲��ϼ��Π�ߴ硢늙C�@����ʽ�ȷ���Ӱ푣�������о�ʮ�����y��Magnet늴ň�����ܛ�����_��늙C�Y���ʹ�䓲��ϼ��Π���·�B����Ҳ���Ќ��T���@����ʽ�c����·���B�ӽ��棬�����̶��ஔ�ߡ����ǣ���c�ŵ�����Ƿ�****���Լ�늙C�\�D�r�l������ز��]�п��]����
�����ķ���ĽY������߀���ஔ���e�������^�ߵĿɽ��b�ԡ����ǣ�Ҫ���������M�и߷��棬߀��Ҫ���P�������M�д������о���