����ժҪ������ߟoˢֱ��늙C�{��ϵ�y�������ԣ����Ô_���^�y�����ⲿؓ�d�D�ؔ_���M�й�Ӌ�������a��������ģ�����m�����������FPID�������ھ������������m����ϵ�y�Ȳ�����׃������Ĕ_�ӡ�����͌����������OӋ���{��ϵ�y��ϵ�yؓ�d�_�Ӻͅ���׃�����������^�ã��������^�ߵ��ٶȸ�ۙ���ȡ�
�����P�I�~���oˢֱ��늙C�������ԣ��_���^�y����ģ�����m�����ƣ����棻������������D�ӑT����������׃����늘з��������أ��oˢֱ��늙C��һ�N��׃������ϵķǾ���ϵ�y���y���þ��_�Ĕ��Wģ�ͱ��_�����y�Ŀ����^����ه���،����ģ�ͅ������o���M��߾��Ȉ��ϵĿ���Ҫ����ˣ��F��������Փ����ģ�����ơ�ģ�ͅ������m�����W�j���z���㷨�ȱ����ڟoˢֱ��늙C�Ŀ��ơ�3-5]��
����ģ������ͨ�^ģ��߉�ͽ����������������˵Ľ��ģ�ͻ�������Ҫ����ϵ�y���_�Ĕ��Wģ�ͣ���ϵ�y�ă���ɔ_�ͅ����z�������Էdz������ҽY�����Ρ�푑����٣���˺��m�ϟoˢֱ��늙C�{��ϵ�y��Ҫ���Č�ģ�����m�����Ʋ�������oˢֱ��늙C�{��ϵ�y�У�ͨ�^�����OӋģ�����m������������������{��ϵ�y�������Ժ��ٶȸ�ۙ���ȡ�
�������Wģ�������������B�ӟoˢֱ��늙C������늙C�Ġ�B���̞飺
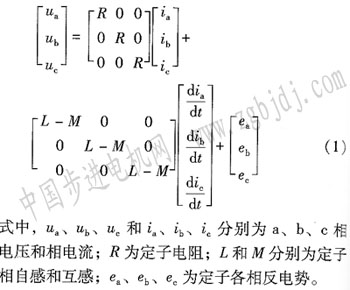
��������ʽ(1)�������ڌ�ͨ�����늙C��늉�ƽ�ⷽ�̺�늴��D�ط��̞飺
�����ء���ݔ���ݔ������������[һ3��һ2��һl��0����2��3]�@��һ���^�g��������ģ���Ӽ���NB����Ns��zO��Ps��PM��PB��ģ�����^���У�e����Kp��Ki��Kd���`�ٶȺ������������Ǻ����ֲ���
����ģ�����m���������OӋ�ĺ�����ģ������Ҏ�t��ԓҎ�t�nj����ҵĽ��Ͳ����ߵļ��ܼ��Կ��Y���ó���ģ���l���Z��ļ��ϡ������в�����͵�ģ��߉��������������ʽ��ʽ��ģ���N���Pϵ��ģ�����m�������������x���M��ģ�������a��ģ��Ҏ�t����Ȼ���ģ��Ҏ�t���惦��Ӌ��C���M���ھ�������ơ�
������ͨ�^ģ�������õ���ݔ����һ��ģ�����ϣ��ڌ��Hʹ����Ҫ�ô_����ֵ����ȥ���ƈ��ЙC�����@����Ҫ��ģ���������IJ�����õļә�ƽ�����M�з�ģ�������õ�Kp��Ki��Kd��ֵ��
������֮��ģ�����m�������ǽ����ڂ��yPID�㷨���A�ϵģ�ֻ��Kp��Ki��Kd�����ǹ̶��ij����������Se��ec��׃�����ھ��{�����Ԍ��F�ڲ�ͬ���r���N�_����r��ϵ�y�ă������ơ�
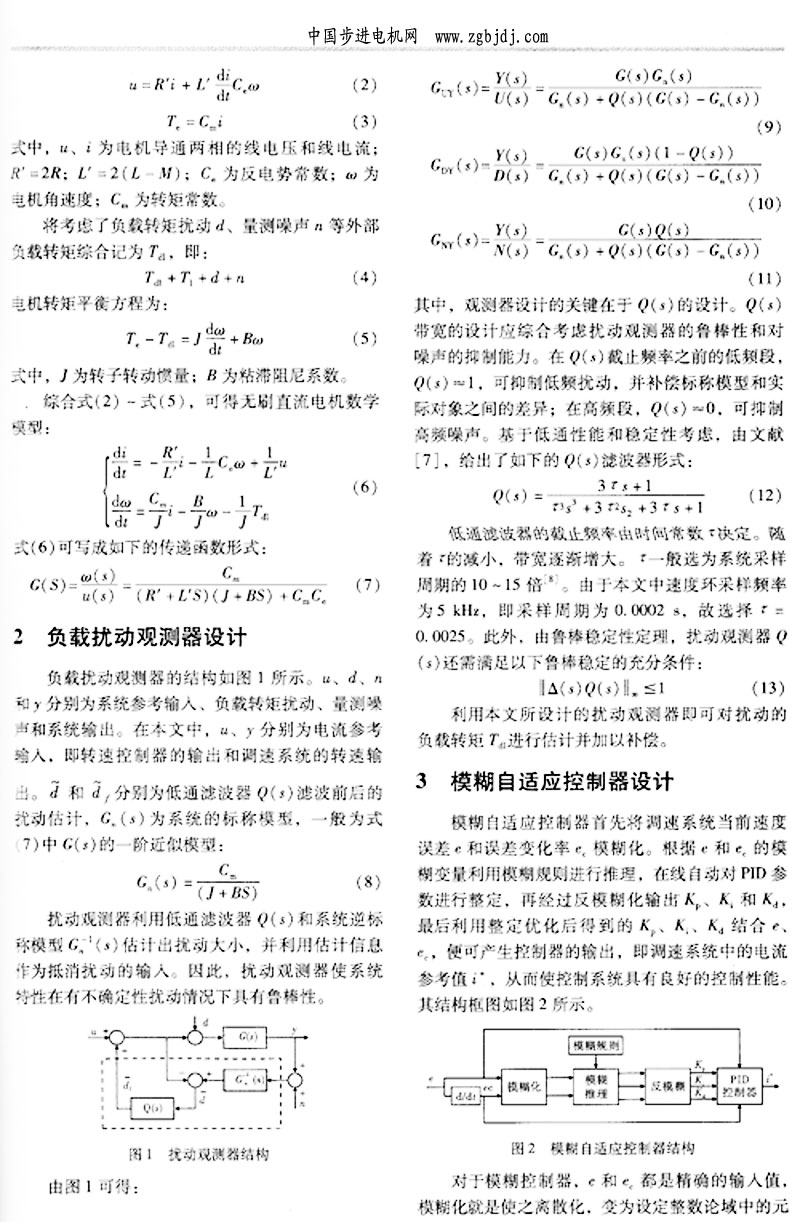
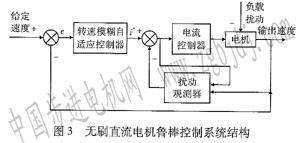
������������͌��Y���������Ϸ��������OӋ�ğoˢֱ��늙C��������ϵ�y�Y����D3��ʾ�����l�F�������ⲿ��ؓ�d�_�ӣ��ڈD3�б�һ���ɔ_���^�y�����ɵăȭh�����������_���^�y����Ӌ���M�����a��������˿���ϵ�y���ⲿ�_�ӵ������ԡ���늙C����׃�������ϵ�y�Ȳ��_��Ҳ��ģ�����m��������ͨ�^PID�������ھ��������õ������ƣ��Mһ��������ϵ�y�������ԡ�
������1�����о��c��������������������ԛ]Ӌ����������һ�_�oˢ
 ���� ����
푑��������ٶȲ��εķ���Y�����ĈD4(a)���Կ�����ͻ��ؓ�d��ԓ�^�y�������^�̵ĕr�g�Ȝʴ_�^�y��ؓ�d�D�ص�׃�����D4(b)�f����ԓ����ϵ�y��ؓ�d�_��������ٶȲ���С�������^�̕r�g�Ȼ؏͵�ƽ���B���@�����ڔ_���^�y�����ٸ�ۙ��ؓ�d�D�صĔ_�ӣ��������@Ӱ��D��ݔ��֮ǰ��ͨ�^�D��ǰ���h���A�ȼ����a�����ʾ����^�õ������ԡ�
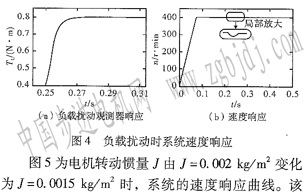
������������ģ�M늙C���H�\���У���ؓ�d�D�ش�С���ֲ��_�ӵ�������D�ӑT��׃����ϵ�y��ɵ�Ӱ푡�
�����ɈD��֪�������D�ӑT���ĜpС���ٶ��������F�˳��{��������ģ�����m����������PID�������Ԅ��{���������ٶ�푑�����Ѹ�ٻ؏���ƽ���B���{���^�̳��m�r�g�̡ܶ��D5������ԓ����ϵ�y��늙C����׃����ɵĔ_�Ӳ����У������ԏ���
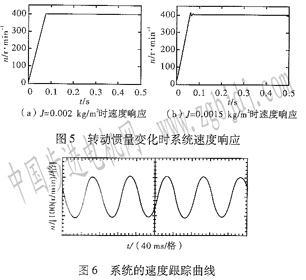
����4��2���Y��������TMS320F2812�����оƬ�Č��ƽ�_����DSP��IPM������z�y���D��λ�Ùz�y�·�Ș��ɡ�����C���OӋϵ�y���ٶȸ�ۙЧ�������������������ٶȽo����̖�����ٶȸ�ۙ������D6��ʾ���ɈD��֪�������OӋϵ�y���ٶȸ�ۙ푑�������ƽ�����o���@���{����ۙЧ���^�á�
����5.�Y�Z
�oˢֱ��늙C����ϵ�y���û��ڔ_���^�y����ؓ�d�D��ǰ���a�����g�����ϵ�y���ⲿؓ�d�D�ؔ_�ӵ������ԣ�����늙C���w����׃����������ɵăȲ��_�ӣ��OӋ��ģ�����m�������������M����Ч���ƣ�ʹϵ�y�������Ե����Mһ����ߡ�����͌��Y�����������OӋ�Ŀ���ϵ�y��ϵ�y����ɔ_�����^�õ������ԣ��Ҿ����{���r�g���٣��ٶȸ�ۙ���ȸߵĿ���Ч����
|











