����ժҪ������TMS3201��812�OӋ��ȫ���ֶ�C���ŷ�ϵ�y��������ȭh���ٶ���h��λ������h�����]�h���ƽY�����OӋ�ˎ���늉������·���������·�Լ����ʹ����·��ܛ������c �Z��ģ�K�����̡����ٶ�Ӌ��ĸ��M������ٶȵ�Ӌ�㾫�ȺͿ��ɔ_������ԇ�Y���������֡��������_���OӋ������
�����P�I�~���ŷ�ϵ�y;ȫ����;�oˢֱ��늄әC;��C;���
����0�� ��
������������S��ϡ�����Ų��Ϻ������Ӽ��g�İlչ�Լ�̎����DsP���ܵ���ߣ����şoˢֱ��늄әC������ƺ��Ρ�ݔ���D�شӑB푑��á��T��С���ɿ��Ըߵȃ��c���õ�Խ��Խ�V�����о��͑��ã�����������С���ʸ������{��늙C���ŷ�늙C���ں��պ��졢܊�¡���늼��������I�I���ЏV韵đ���ǰ�����о��rֵ��
����ģ�M�ŷ�ϵ�y���ںܶ�ȱ�ݣ�����ƾ�·�w�e�����������M���Ʒ������\�ã��·�����ܭh��Ӱ푴ɿ��Բ�ȣ��S��DsP���ܵ���ߣ�ȫ���ֿ��Ƶ��������ŷ��������С�
����1�ŷ�ϵ�y�Y���c�OӋ
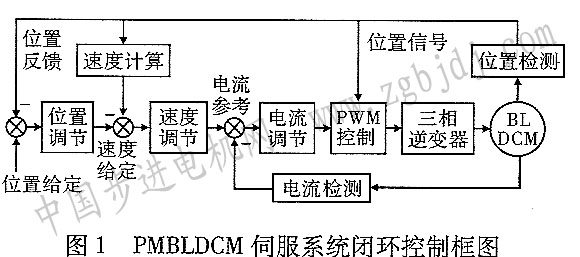
�������ˌ��F���_�Ķ�λ�����Cϵ�y�ķ��������٣��ŷ�ϵ�y�������h���ƣ���D��Dl��ʾ������h����ȭh���ٶȭh������h��λ�íh��������h��λ�ýo���cλ�÷����γ�ƫ���λ���{����a���ٶȅ����������c�ٶȷ�������ƫ��ٶ��{�����γ�����o���������c���������ƫ�����{��ݔ��PwM���Σ�������׃���_�P�ܵ��_ͨ�c�P�࣬�Ķ����Ɵoˢֱ��늄әC�����Fλ���ŷ����ơ�
����
�����Δ��Ϲ��{�Ʒ�ʽ���Ԝp���_�P�ܵēp�ģ�������·�cݔ���Դ������ѭ�h��ʹϵ�y�и��ߵ�Ч�ʡ����ŷ�ϵ�y����120����ͨ�^�g���Ϲ��{�ƣ��¹ܳ�ͨ����ϵ�y�����]�h�{����������PID���ơ�����h���ƵČ����ɂ��T�ԭh���Ĵ��B�������{���������OӋ������������hУ�� �ɵ�I��ϵ�y��Ҫ���F���ٵ������ۙ������{�����x��PI�{��������h�����ٶȭh�ăȭh�����{������Կ���һ���T�ԭh�������ٶȭh�Ŀ��ƌ�����һ���T�ԭh����һ���e�֭h���Ĵ��B�������{���������OӋ���������ٶȭhУ���ɵ��͢���ϵ�y���ٶ��{�����x��PI�{����
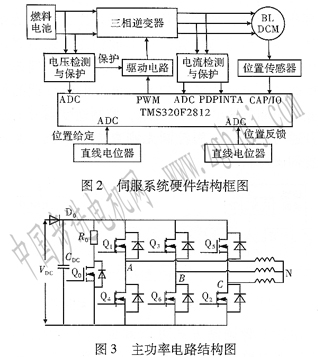
����һ����r�£��ŷ�ϵ�y��ϣ�����Fλ��푑����{������푑������½����ʌ�λ�íhУ���ɵ���I��ϵ�y���{������P�{���� 1.1Ӳ���OӋ �ŷ�ϵ�yӲ���Y����D2��ʾ��ϵ�y��Ҫ�ɿ����·�����ʷŴ��·��λ�Ùz�y�·���ɘ��·�����o�·�Ȳ��ֽM�ɡ�
����(1)�������·�����·�OӋ
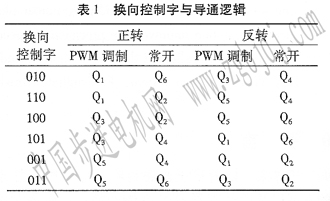
��������߶����@�M�������ʣ��pС�D���}���Լ������·�ɱ�����׃��һ���������ȫ���ӽY������D3��ʾ���ŷ�늙CҪ�����������\�С����Ƅӕr����������ֱ���ȣ���ȼ��늳��f�Dz����S�ģ���ֱ����횴����O��DC�����C����������ӡ������������o���cDC��늣��^���������늉������·ጷš������·���Ü��h���ơ���cDC늉����^���h����ֵ���_ͨ���ʹ�Q���������ROጷ�����;��cDC늉����ڜ��h����ֵ���t�P��ʹ�QO��
����
�����D4�o���OӋ���õĹ������·����оƬ���Î�������x�Č�����оƬ[R3120���鱣�C���ʹܿɿ��P�࣬���÷�����IN4733��ʹ��@��һ5 V���ҵ��P��늉���
����

����(2)�����·�OӋ
��������������TMs320]?2812�������оƬ��������λ�ýo���ͷ���ͨ�^AD�ɘәz�yֱ���λ��늉��õ�����������������z�y��������������������B���õ��������������z�y���{���·�{�����C���ڲɘ��·��Ҫ���03 V���̃ȣ�Ȼ������DSP2812��3��_A/D�ɘӿڡ�3��λ���g��120��ֲ��Ļ���λ�Â�����Hl��H2��H3�����θ��x�·��քe�cDsP��3�������_���B��ͨ�^�a�����Д����o���Q��r�̣�����õ��Q������ֲ��ṩ�ٶ�Ӌ����̖���Q��������c��ͨ߉�Č����Pϵ���1��ʾ�����˱��C�ŷ�ϵ�y��ȫ�\�У���ϵ�y�OӋ��Ӳ���^����Ƿ�����o���^�����o
����
����1.2ܛ���OӋ
����(1)�]�h�����F
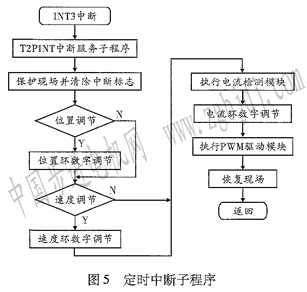
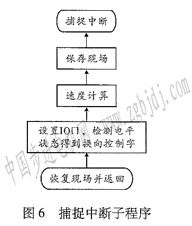
�����ŷ�ϵ�y����c�Z�Ծ��̡�ܛ�����������r�Д����Ͳ��Д������ֽM�ɡ��Д��ӳ�����D5��6��ʾ���������M��ϵ�y��ʼ����ʹ�� T2�����Дಢʹ�܃Ȳ��Д�INl3���ȴ��Д�l�������r�Д����ڞ�25��s��λ���{�����ڞ� 10 ms����������ٶ�푑����������ӡ�ͣ�D�ʹ���Ӝp�ٕr�{����ͣ�����ͨPI�{�������A�ϸ��M��b��g��bang���ơ����yֵ����200 r/min���ٶ��{�����ڞ�2.5 ms���ٶȷ����Ļ�����������λ����̖�õ�������{��ÿ�ζ��r�Д��M��һ�Ρ�����z�y����T1P��������AD�ɘӣ��z�y����������z�y��������M���{��̎���������������. ͨ�ö��r��GPl�O�ó��B�m��Ӌ��ģʽ�����ΰl�����a���nj��QPwM����
����
����1.3�ٶ�Ӌ��
�����īI[3]���ÃɴΓQ���g������̶��ĽǶȁ�Ӌ���ٶȡ����ڌ��H�Ļ���������צ�P���y������ȫ���Q������Ӌ��õ����ٶ��`��Ҳ�^����������D�����Dһ�ܵ��g���Ӌ���ٶȣ��t���Ժܺõ������@�N�`�������늙C�����@�N�ٶ�Ӌ�㾫����ȫ�M��Ҫ�����D�ӓQ��r����Д_�ӄt�п���ʹ��늙C��˲�g�Ķ��ӣ��ٶ�Ӌ����e������Ӌ���ٶȕr���뿹�_��̎�����惦�ϴ�λ����̖��ÿ��cAP�Д࣬�x����λ����̖�cǰһ�α��^���Д��Ƿ�Q�����_����t����Ӌ���ٶȡ��@�N�����ܺܺ��ų��ٶ�Ӌ��ɔ_��
����
����2ԇ�Y��
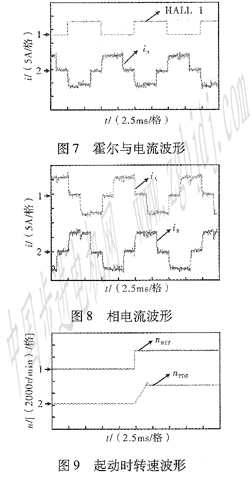
������������ԭ���������OӋ�������ŷ�������ԭ��әC��늙C�~��늉�uDC=56 V���~������ 850 w��2���O;���ʹ��x��IXf��R200NIOP���M����ԭ��ԇ�D7���p�d�r������̖�c������Ρ�ͨ��1�ǻ���λ����̖HALLl��ͨ��2��A �������̖��������̖ݔ���鷴߉���½����_ͨ���ʹܣ��������P��ʹܡ��D8��A���B ��������Ρ��D9�����ӕr���ٶȲ��Ρ�ͨ��1���ٶȽo����ͨ��2���ٶȡ��ٶȽo����3 000 r/ min�ٶȷ����ܺܺõظ�ۙ��
����
����ԇ�Y��������C�����е�ԭ�����������������ܵă���߀�����Mһ��������
����3�YՓ
���������M����DsPȫ�����ŷ����������OӋ���������әC��ԇ�Y��������ϵ�y�Y�����Σ����������^�á��ٶ�Ӌ��r����ؼ���λ�ò��Д࣬��Q���ٶ�Ӌ��ɔ_���}��
����
|











