ժҪ�����Ƚ�B���_�P����l늙C(sRG)�Ĕ��Wģ�ͣ�����M atlab/simulink�h�����l늿���ϵ�y�Ǿ���ģ���M�з��档����Y���������_�P����l늙C���Ѓ����İl����ܣ�����l늿���ϵ�y���о���һ���ą����rֵ��
�P�I�~���_�P����l늙C���l늿���ϵ�y�����Wģ�ͣ�����
0 �� ��
�_�P����늙C����һ�N���͵ęC�һ�w��늙C������Ʒdz��`����Ժܺõ���늄Ӡ�B�Ͱl늠�B���\�С��_�P����늙C������������עĿ�����c������Ī����ԣ����������@�M�g�Ĵ�·���·���c���y늙C��ȣ��_�P����늙C�������εĽY���ͺܺõ����e�������@Щ���cʹ�_�P����늙C�кܸߵĿɿ��ԡ����Զ�ʮ���o��ʮ����_�P����늙C�����ԁ����W�߂���༯�����о��_�l�����{��늄әC���^�������漰�l늷�����о������IJ���APc(�{��λ�ýǿ���)��ccc(����ز�����)�Y�Ͽ��ƌ��_�P����l늙C�İl������M�з����о���
1늙Cģ��
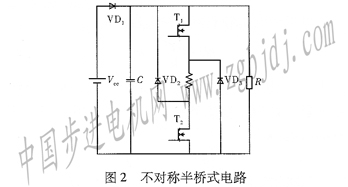
�D1��12��8�O�_�P����늙Cһ���·ʾ��D���ɈD��Ҋ��A�ඨ���c�D���X�ŘO���ľ��غϣ���
�r��ͨB�ඨ���@�M��������ͨ�����ش�����С(�Ō�****)��·���]�ϵ�ԭ�����D����r��D�ӣ�
�Դݔ�����ܺ�늴��D�خa���ęCе�ܶ��D���ɴň��ܣ����D���cB�ඨ�ӴŘO���ľ��غϕr�����_sl��s2���D������r��D�ӣ����˕r�D���ܵ���늴��D��������׃��ؓ��ͨ�^D1��D2�m��������Ĵň��ܺ�늴��D�خa���ęCе���D�Q����ܡ�ͨ�^�x���m�����_ͨ�Ǻ��P��ǣ�����ʹ�_�P����늙C�\���ڰl�ģʽ��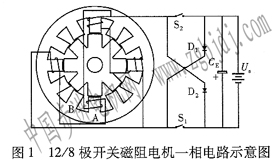
늙C��늄ӄ�ƽ�ⷽ��ʽ�飺
ʽ�У�US��ĸ��늉���i��˲�r�������R�����@�M��裻�מ����@�M��朣������P���������λ
�õĺ�����
�������g��ϣ�늙Cһ��늴��D�؞飺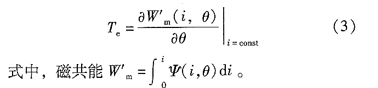
�����O��·��ͣ���늸в��������Ӱ푣��t늴��D�ط��̿Ɍ��ɣ�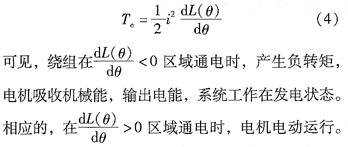
��ˣ�����늸��½��^����m�����x���_ͨ���P���r�g����ʹ�_�P����늙C�\���ڰl�ģʽ��
2 SRG�l늿���ϵ�yģ��
���IJ��÷Ǿ��ԴŅ���������sRG�l늿���ϵ�yģ�͡����_�P����늙C�P���D��λ�ýǺ���
�����늉�ƽ�ⷽ�̞飺

��Ҋֱ������ʽ���������r���漰��(i����)��ƫ�������F�����\�㡣��ˣ��ڽ�ģ�r���茢��
机�����(i����)���ݣ��D�Q��������Ժ�����(i����)������ʽ(6)�M��늙C���ܷ��棬�Ķ�������
�\�㣬���Ӌ�㾫�Ⱥͷ����ȡ�

�����_�P����늙C���������P���������λ�ýǶȵķǾ��Զ��S�������]�о��w�ĺ������_ʽ�����ݕr��횲��Ô�ֵӋ����k�������˱��Cģ�͵ķ��澫�ȣ����IJ�����spline���Θӗl��ֵ����
��ϵ�y�����㷨����׃���L��ode45�㷨���������^����ٶ����M�о��_���档
ϵ�y���õĹ���׃�Q�·ģ�͞��Ԅ��Ͳ����Q����·����D2��ʾ��
늙C�_ʼ�\�е�˲�g����ֱ���Դ���_�P��T1��T2���@�M�ṩ�����������l�늉��_���o��ֵ��ֱ���Դ���Д࣬��늙C�����l������ܽ���������@�M�ṩ��š��l��A�����ڴ���VD1����ֹ�������ֱ���Դ���������VD2��vD3��ؓ�d��늣�ͬ�r�@�M���ܵķ���늉���С��ؓ�d늉���С��
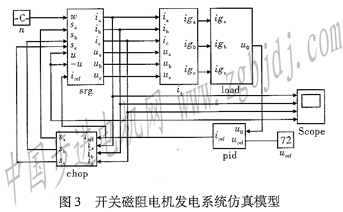
�l�ϵ�y���w��D��D3��ʾ��ϵ�y����ģ����Ҫ�����ચ����ģ�K���ɣ��������D��Ӌ��ģ
�K�������^�e������ģ�K��ȫ���Q������ģ�K��Ҫ������
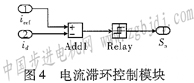
��������h����ģ�K
ģ�K��D4��ʾ��ͨ�^���h���F������Ķ��B�ز����ơ���ij�����_�P�܌�ͨ�r������������_ʼ����������������^���������ƫ����ڜ��h���^���ĭh���r�����_�P������ͨ��
����׃�Q��ģ�K
ģ�M�����Q����·(�D2��ʾ)�������ԣ�������ݔ����̖�o�����������@�M늉���
���D��λ�ý�Ӌ��ģ�K
ģ�K��D5��ʾ���Á��a�������D�Ӯ�ǰλ�á�����12��8���_�P����늙C���D�ٽ��^�e���A�������45�����ຯ��ģ�K���γ�һ��λ��������̖�������λ����̖�ɷքe����15�㡢30��õ���
�D5�D��λ�ý�Ӌ��ģ�K
�����Ӌ��ģ�K
���Ӌ��ģ�KҊ�D6��ݔ�����@�M늉����^�e���\��õ���朣���机��D������λ�ý��^���S������ݲ����ݔ���������
��늉�PID�{��ģ�K
늉�PID�{��ģ�KҊ�D7��ݔ��酢��ݔ��늉��͌��H�y��늉�ݔ�������������������ֵ��
�����^�̞飺늙C�D��ݔ�뵽srgģ�K��늙C�l��\�С����l�늉�С�ڽo��늉��r��늉�PID�{��ģ�Kݔ��������������l�늉����ڽo��늉��r��PIDģ�Kݔ����������pС�����l�늉�ʼ�K���ڽo��늉��r��ݔ����������_��������������c������������h���^���õ��Ĕز���̖�c****�_ͨ�P��ǹ�ͬ�Q�������@�M���_�P��B�����У�****�_ͨ���P����Ǹ���늙C�D�١�ĸ��늉����o��늉����l�����x��ģ����_��****�l늹��ʞ郞��Ŀ�˵��_ͨ���P��ǡ����D��λ�ô����_ͨ�ǣ�С���P��Ǖr�����@�M��ͨ���ڴ˅^�g�Y�ϔز���̖�������ز����ƣ��Ķ����F�l늿��ơ�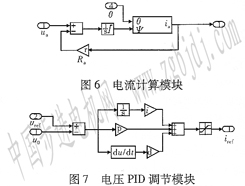
3����Y�����YՓ
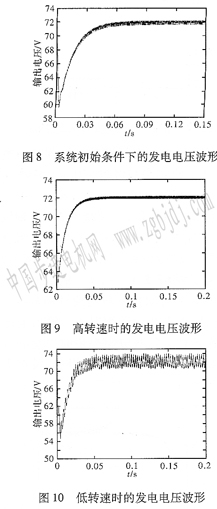
12��8�O�_�P����늙Cģ�ͅ����飺�~�����ʞ�2 200 w���~��늉���72 v���~���D�ٞ�2 800 r��min�����ӘO����15�㣬�D�ӘO����17�㣬��늸�****ֵ��4��2 mH����Сֵ��0��53 mH��ϵ�y��ʼ�l����ĸ��늉����㣬�D��2 700 r��min�@�M����O��05 ����ݔ������ݞ�2 000��F��ݵij�ʼ늉���72 V��ؓ�d����5 �����o���l�늉���72 V��
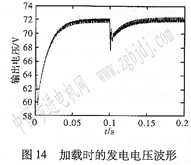
�D8��ϵ�y��ʼ�l���µİl�늉����Ρ��l�늉����_ʼ��O��05 s��Ѹ���½����@�����˕r늙C�_ʼ���ӣ����]�аl늣���ݞ�늙C�ṩ����������������늉��½����Ķ�Ӱ푰l�늉���֮��늙C�l��������������늉���u�������o��늉�ˮƽ���ĈD�п��Կ�����ݔ��늉�������r�g�죬��s��50 ms���]�г��{��늉������r���ӵķ�ֵС���s��O��39 V��
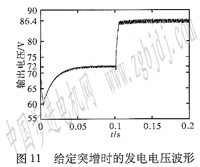
�D9�͈D10�քe�Ǹ��D�ٺ͵��D�ٕr�İl�늉����Ρ��D9�D�ٞ�4 500r��min���D10�D�ٞ�9��r��min���ɃɈD��Ҋ���oՓ���D��߀�ǵ��D�٣�ݔ��늉���������50 ms���ҵĕr�g��Ѹ���_��Ŀ��ݔ��늉������D�ٕr��늉��y����ֵ�pС��
0.23v���D�ٕr�����ڰl������ز���ʹ��늉��y����ֵ����3��5 V��
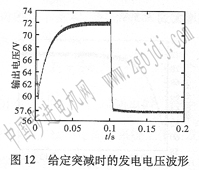
�D11�͈D12�քe�ǽo���l�늉�ֵͻ����ͻ�p�r�İl늲��Ρ��D11��o��늉�ֵ��0 l sͻ��20������86��4v��늉����Ρ��D12��o��늉�ֵ��0.1 sͻ�p20����57��6 V��늉����Ρ���Ҋ���ژO�̵ĕr�g��(�s0��002 s)��늉����܉�ƽ�����ٵ��_���µĽo��ֵ��ͬ�r���l�F���o��늉�ֵͻ�����B늉��y����ֵ����1��2 V���o��늉�ֵͻ�p�����B늉��y����ֵ�pС��O��3 V���o��늉�ֵԽ�t��Ҫ����İl�������@�ӕ����°l�늉��ļy����ֵ����
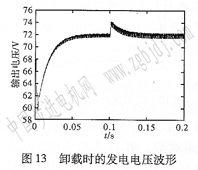
�D13�͈D14�քe��ж�d�����d�r��늉����Ρ��D13��5 ����ؓ�d�����O��1 sͻ����7 �����l늹�����1036��8 w�pС��740��69 w���D14��5n��ؓ�d�����0��1 sͻ�p��3�������l늹�����1036��8 w����l 728 w��ؓ�d���ͻ��˲�g���l�늉�ͻ׃��74.1 V��ؓ�d���ͻ�p˲�g���l�늉�ͻ׃��67.2 V��ͬ�ӣ�ݔ��늉�Ҳ�܉���O��05 s���ҵĕr�g�������_��Ŀ��늉���Ҳ�����f����ݔ������׃������r�£�ݔ��늉������ஔ�õķ����ԡ�ؓ�d���ͻ���r���l�늉��y����ֵ��0��78 V��ؓ�d���ͻ�p�r���l�늉��y����ֵ��0��65 V��
�ɷ���Y�����Կ������_�P����늙C�l�ϵ�y�����{�����Ժá�푑��ٶȿ졢���{С��늉�
�y��С�������ԏ��ă��c�����õķ��B�̈́ӑB�l�����.