ժҪ�����y�Į���늄әCֱ���D�ؿ���(D��rc)��늉�Դ��׃��(VsI)늉�ʸ���������ƣ����ܺ������ƶ��_
�P����������D���}���^�����xɢ���gʸ���{��(DsVM)���������M�и��M�������˿��x���늉�ʸ����ʹ늉�
ʸ���ڷ�ֵ����λ���^���B�m�����Ҹ����D�ٲ�ͬ�քe�ƶ����_�P�����������^���D���}�ӳ��F������Y���C���D
���}�ӡ�����}�����@�pС��
�P�I�~��ֱ���D�ؿ��ƣ��xɢ�Ն�ʸ���{�ƣ��D���}��
�ЈD���̖��TM343 �īI���R�a��A ���¾�̖��1004��7018(2IJIl9110��0053һ03
O�� ��
ֱ���D�ؿ��ƾ��п��ƽY�����Ρ��D��푑��졢���ڔ��ֻ����F�ȃ��c������Ҳ���_�P�l�ʲ��̶����D���}�Ӵ�(�����ڵ���)��ȱ�c���Ķ�������ֱ���D�ؿ���ϵ�y�đ��÷�����ᘌ��@Щȱ�c�˂�����S����M�������������ܿ��Ʒ����A��늉������������ܿ�����������h�{�������x����׃���_�P��B����ʹ����Ч��׃�ø������룻�A��늉�����Ӌ������Ӵ������Ҫ��׃�������a����机��D�ص�ƫ�����sVWM���g�ϳ���������Ҫ��늉�ʸ���������@Щ��������Q���D���}�ӆ��}��ʹϵ�yܛ���Y�����s��Ӌ������׃�L��������Щ���������ӌ�늙C��������ه�ԡ�
��Ԕ���ط����˂��yDTc�a���D���}�ӵ�ԭ����A�ϣ�ᘌ��@Щ�a���}�ӵ�ԭ�����DsvM���xɢ���gʸ�����Ƽ��g��DsVM����������늉�ʸ���Ă��������@Щ늉�ʸ���ڷ�ֵ����λ�Ͽ����^
���B�m��׃�������ö༉���h�{�����Y���D�ٵ������ƶ��_�P�����@�N�����ڜpС�D�غ�����}�ӵ�ͬ�r�������ӿ���Ӌ����s�̶�3��
1���yDTc�Y�����D���}���γ�ԭ��
���yDTc�����Y����Dl��ʾ��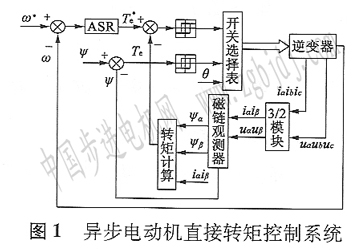
�ڂ��yDTc�У���朡��D�صĽo��ֵ���^�yֵ��ƫ��ͨ�^���h�{������׃����8������늉�
���gʸ�����x����m��늉�ʸ�������F���D�غʹ�朵�������ƣ�ʹ�D�غʹ�朸�ۙ���o��ֵ��
���yDTCһ���Dz�����ʸ���ͷ���ʸ������ʹ�Á��{���D��׃���ġ�����늉�ʸ�����ȅ^�ֲ��D��D2��ʾ��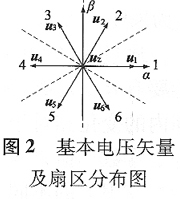 ��������늉�ʸ��λ�Ì�����ƽ��֞�6���ȅ^����һ���ȅ^�_�P�����1��ʾ��CT��ʾ�D���h�{������ݔ��ֵ ��ݔ��ֵ��һ��ʾ��Ҫ�pС��朻��D�ط�ֵ��-1��ʾ��Ҫ���������D�ط�ֵ��O��ʾ�����D�ط�ֵ��׃����һ�ȅ^�����x���늉�ʸ����5����u2ʹ�D�غʹ������u3ʹ�D�������朜pС��u5ʹ��机��D�pС��u6ʹ�D�pС�������u2�Ɍ��F�D�ؾ����ĜpС����cT=0�r�x��u2�� ��������늉�ʸ��λ�Ì�����ƽ��֞�6���ȅ^����һ���ȅ^�_�P�����1��ʾ��CT��ʾ�D���h�{������ݔ��ֵ ��ݔ��ֵ��һ��ʾ��Ҫ�pС��朻��D�ط�ֵ��-1��ʾ��Ҫ���������D�ط�ֵ��O��ʾ�����D�ط�ֵ��׃����һ�ȅ^�����x���늉�ʸ����5����u2ʹ�D�غʹ������u3ʹ�D�������朜pС��u5ʹ��机��D�pС��u6ʹ�D�pС�������u2�Ɍ��F�D�ؾ����ĜpС����cT=0�r�x��u2��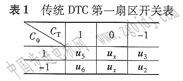
���yDTcͨ�^���h�{����һ�����ڃH���x��һ������늉�ʸ�������ڰ˂�����늉�ʸ��������
���B�m������ʹ�D�ؼ������������½����ں̵ܶĕr�g�ȵ��_���O�����D���ݲ��ϣ����ޣ���һ������ʣ���r�g��߀�^�m�����pС����K���^�D���ݲ�����D���}���^���Ҹ�����ʽ���㣬�ڲ�ͬ���ٶȅ^�g늉�ʸ�����D�ص�Ӱ�Ҳ��ͬ�����w�������� ������s����r�քe�鶨���D�Ӵ�朣�us�鶨��늉����gʸ����Rs�鶨����裻is��ir���քe�鶨���D�����Ls��Lr�քe�鶨���D��늸У�Lm�鶨���c�D�ӆ��Ļ��У�ts��ɘ����ڣ��؞��D�����D늽��ٶȣ�p�������ӡ� ������s����r�քe�鶨���D�Ӵ�朣�us�鶨��늉����gʸ����Rs�鶨����裻is��ir���քe�鶨���D�����Ls��Lr�քe�鶨���D��늸У�Lm�鶨���c�D�ӆ��Ļ��У�ts��ɘ����ڣ��؞��D�����D늽��ٶȣ�p�������ӡ�
ͨ�^ʽ(6)���Կ������c�D��׃�����P��׃����Ҫ��us���ء���s��Te�����Цء���sTe��һ���ɘ����ڃȵ�׃�����������늉���׃�����Ժ��Բ�Ӌ�J���dz��������Ǧ��ڲ�ͬ���ٶȅ^���D��׃��Ӱ��кܴ�IJ�ͬ���������c����us�����c�D��׃�����Pϵ�Լ�����ɵ��D���}���M�з�����
(1)us���D���}�ӵ�Ӱ�
���yDTcһ���ȅ^�ȣ������x���늉�ʸ���^�٣��D�غʹ�������pС��ÿ�N��rֻ�܌����x
��һ������늉�ʸ��(���1��ʾ)����ʽ(6)��������һ���ȅ^�����x��ͬһ��us�c��s�A�Ǧ��S
����s���D�Ӷ�׃������TeҲ�S���ȵ�׃����׃����һ���ȅ^�Ȧ�׃�������^���Еr��ʹһ������
�ȵġ�Te�h�h�����D���ݲ����D���}���^��
(2)�،��D���}�ӵ�Ӱ�
���٠�B�µ��D���}�ӳ�����us���ص�Ӱ��⣬�D�ٌ��D���}�ӵ�Ӱ�Ҳ�ܴ����ڦ�s��us
�أ���s��2�η��еĦ��^���ڜ��h�{������ʹ�D�pСֵ��������ֵ����һ���ȅ^�еģ���s��us��ֵ�^Сλ���ϣ���Щʹ�D�������늉�ʸ���ڸ��ٕrֻ��ʹ�D�pС�����Ԃ��yֱ���D���ڸ��ٕr���^���׳��^�D���ݲ����ޣ�����^����D���}�ӡ�
���ď�����ԭ�����ֲ�����DsVM���������yDTc�M�и��M��
2 DsVMֱ���D�ؿ���ϵ�y
2 1����˼��
DsVM�Ļ����{��˼��������sVPwM������������늉�ʸ���ϳɷ������õ���ϣ����늉�ʸ����
����ͬ����DsVM���ںϳɵ���������ʸ�����Õr�g�o�轛�^Ӌ�㣬������һ��1��3���ڡ����yDTc�ȅ^1���x��늉�ʸ����5����DsvM�{�Ƽ��g���nj��@5��늉�ʸ��3��һ�M�M�����нM�ϣ�
�γɲ�ͬ����ͬ��ֵ��19��늉�ʸ������D3��ʾ
�D��ÿһ�����c��ʾһ���ϳ�늉�ʸ���ĽK�c����23z����ʾ��V2��V3����ʸ�����ϳɵ�ʸ�����@
��DsVM�{�Ʒ����������˴��������x���늉�ʸ�����h�h���ڂ��y��8������늉�ʸ����
2 2 DsVM�{�����c
DsVM�{�Ƽ��g�ϳ��˷�ֵ����λ�^���B�m��늉�ʸ�����pС������늉�ʸ���^���Ҳ��B�m����
�ɵ��D���}�ӡ����������ٶȌ����D��׃���IJ���Ӱ푣������ٶȲ�ͬ�֞�ߡ��С��������ٶȅ^�����ٕr��늄ӄݴ�ʽ(6)�еĦأ���s��2�η������^�������õ�늉�ʸ���^�࣬����ÿ���ȅ^�֞���ؓ�ɲ��֡�������_�P���l���ГQ�����ٶȅ^֮�g��һ���غϡ�ϵ�y�����弉�D���h�{���̓ɼ���朜��h�{����
DSVM�����c��
(1)ÿ���ȅ^��19���ɹ��x���늉�ʸ�����������x��늉�ʸ���ڷ�ֵ����λ�ϸ����B�m���@��
�Ͳ�����ʹ�D���}�Ӵ����D���ݲ
(2)�D���{�����弉���h�{���������D��ƫ��ֵ��С��ͬ���x���ֵ����ͬ��늉�ʸ����
(3)��ֿ��]���D�ٌ��D��׃���ʵ�Ӱ푡�������ͬ���D���ƶ��_�P����
2 3늉�ʸ�����x��
늉�ʸ���x�������������(1)��̎�ȅ^��(2)���h�{��ݔ��ֵ��(3)�D�١�
���2��ʾ���Ե�һ�ȅ^���������ٕrc��=1��cT= -1���@�r�D��ƫ���^С����Ҫ�x��ʹ�D�������^С��늉�ʸ�������x��3ZZ�����D���h�{��ֵ��һ2�r�����x��333���@�Ӿͱ��������D��ƫ���^С���^��r�x��ͬ�ӵ�늉�ʸ�����Ķ�����^����D���}�ӡ�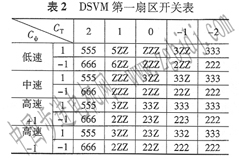
����ǰ����������ٕr�أ���s��2�η��^���@�ӕ�����D�pС�����^���Լ���Щʹ�D�������늉�ʸ���˕r��ʹ�D�pС�������@�ӵ�ԭ�t���D���h�{��ֵ��늉�ʸ���M���x�������ڸ���+1�ȅ^c��=1��cT=2��l��O��һ1��һ2�r�քe�x��555��3zz��33z��333��333�����˕r3ZZ�ѽ�����ʹ�D�������ֻ��ʹ��pС�ˣ����cT=l�r߀�x��5ZZ�Ϳ���ʹ�D���}���h�h���^�D���ݲ
3���漰�Y������
�քe����DsVM DTc�͂��yDTc��simulink����ģ�ͣ�늙C�~���D�ٞ�1 430 r��m JfJ���~�����ʞ�4 kw���~���l�ʞ�50 Hz���O������2����������늸О�I 405 n��0 005 839 H���D������늸О�1.395 ����0.005 839 H�����D�ӻ��О�0��172 2H���o�����Ӵ��1.2 wb��ؓ�d�D�؞�25 N��m���D��PI�{�����ޞ�75 N��m�����D�ٞ�100 r��min��1.100r��min�r�M�з��档
��D4���D7��ʾ���o���D�ٞ�100 r��min�r���yDTcƽ���D���}�ӷ�ֵ��4��2 N��m��DsVM��DTc��2 35 N��m���c���yDTc���DsVM DTcƽ���D���}�ӷ�ֵ�½���44�������ٕrDsVM�{�Ƽ��gʹ�D�ء�����}��׃�ø�С���������˂��yDTc���������׃��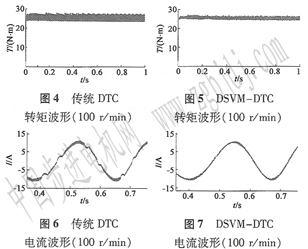
��D8���D11��ʾ���D�ٞ�1 100 r��min�r�����yDTc�D��ƽ���}�ӷ�ֵ��3 8 N��m��I)SVM��DTc��2 3 N��m��ƽ���D���}���½���39 5�����D�ء�����}�����@׃С��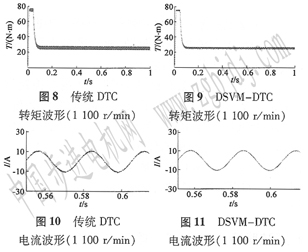
4. �Y�Z
ᘌ��D���}�Ӯa��ԭ����I)SVM�{�Ʒ����M�и��M���@�N���������˿����x���늉�ʸ���������ƶ����_�P�����քe�������yDTc��DsVM��DTc�ķ���ģ�ͣ���100r��min��1 100 r��min�ɷN��r���M�з��棬�����ڂ��yDTc��DsVM��DTcƽ���D���}�ӷքe�½���44����39��5�����D�غ�����}�������@�ĜpС�������ڵ��ٕr�pС�D���}�ӵ�Ч�������@��
|











