ժҪ����B���Ը�����dsPIC30F4012оƬ����ĵğoˢֱ��늄әC����ϵ�y��Ӳ���OӋ�͌��F��ȫ������иF�oˢֱ��늄әC�\��ԭ���Ļ��A�ϣ��U���˟oˢֱ��늄әC�Ŀ��Ʋ����Լ�ܛ�����F��������������ԓϵ�y�Y�����ξo�������ƾ��ȸߣ��������õ��o�B�̈́ӑB���ܣ�����ɑ������ŷ��C�����C�һ�w�����{���O���С�
�P�I�~��dsHc30F4012���oˢֱ��늄әC������ϵ�y
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2009)10��0043��03
0����
�S�������Ӽ��g����Ӽ��g�����M���Ƽ��g��ϡ�����Ų��ϵĿ��ٰlչ���oˢֱ��늄әC�õ���Ѹ�ٵ��ƏV���oˢֱ��늄әC�����w�eС�������p����Ч���ܡ��{�ٷ��㡢�Y�����Ρ����ڿ��ơ������ܶȴ��Լ����ھS�o�ȃ��c�����ŷ����ơ�늄���܇���C���˼�����������I��õ��ˏV���đ��á����S�����ϳɹ����������ˢֱ��늄әC1��
�ڟoˢֱ��늄әC����ϵ�y�У��x��һ�����܃�Խ��оƬ��CPU��������ϵ�y�����w���ܡ���
�Ŀ���ϵ�y����Microchip��˾��dsPIC30F4012������ƺ��ģ��@ʹ�ÿ���ϵ�y�ĿɔUչ�ԡ��`���ԡ��m�����Լ������Ŀ����Եõ��˝M�㡣
1ϵ�yӲ���OӋ
���Ľ�B�ğoˢֱ��늄әC����ϵ�y��Ҫ�������傀���ֽM�ɣ�dsPIC30F4012��IP,2130��������׃��λ�Â��������oˢֱ��늄әC��Ӳ��ԭ����D��D1��ʾ��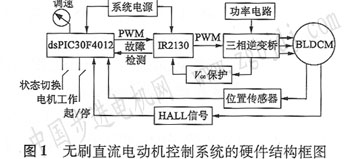
�����^�����£�dsPlC30F4012�������@���Ļ���λ����̖�������D���o��B���_��PWM��ݔ��
�D1�oˢֱ��늄әC����ϵ�y��Ӳ���Y����Dͨ����ݔ����PWM����оƬIR2130���_��������MOSFET��ʹ��늙C�������@�Mͨ�^�����늙C���o�������B�m�D�ӡ��{���{�����o���Ը�׃
dsPIC30F4012ݔ��PWM��ռ�ձȣ��Ķ��{��늙C�@�M�ɶ˵�ƽ��늉������F늙C�D�ٵĿ��ơ�
ϵ�y�е�����оƬdsPIC30F4012�nj��T��늙C���ٿ������OӋ��һ�N16λ̎������������
һ��16λCPU��һ��DSP�Ⱥˣ�Ƭ���O��һ��6ͨ����A��D�D�Q����������10λģʽ���ɘӱ��֕r�g���D�Q�r�g���yֵ�z�y��ʽ����ƫ�a��У�����ɾ��̣�5��16λ���r����һ��6ͨ����늙C����MCP��WM�����������b�ô���ˮa���}���{��(PWM)���εĿ���ܛ�����ⲿӲ����ͨ�^���̿ɮa�����a������6·PWM����2����ͨ�^�����O�����^�r�g��ֹͬһ�����2�����ʹܰl��ֱͨ��ɶ�·����ϵ�y�в���PWM�{�ٷ�ʽ��ϵ�y�l�ʞ�24 MHz���������·������ȫ�������·��
��оƬ�x���������H��������˾��HR2130,һ��IR2130����������ʽ�·�����������_�P
�������Ȳ��OӋ���^������^늉���Ƿ늉����o��ʹ�Ñ��ɷ�����Á����o���ӵĹ���MOs�ܼ�֮�Ȳ����e���g������ã�ʹ�������ڸ߉�ϵ�y����߀�Ɍ�ͬһ������ɹ���MOs�����ĖŘO����̖�a��2��s�����^�r�g��ʹ�OӋ�Mһ������ϵ�yӲ���·���p���w�e����߿ɿ��ԡ���ݔ����****�����ֵ�������250 mA���������ֵ�������500 mA���͉�600 V�M��Ҫ��3���������·��D��D2��ʾ��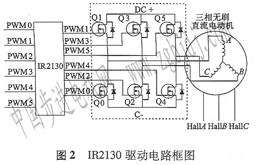
������׃���е��_�P�����x�ù���M0sFET�������_�P�ٶȿ졢�ӹ���С����ȫ�����^�����^�d�������ȃ��c����ϵ�y�x��N�ϵ���MOsFETIRF540���~�������40 A���͉�ֵ��100V���܉�M�㱾ϵ�y��Ҫ�����·�D��D2̓����ʾ.
����������׃�����f��MOsFET���_�P���ã���������������ͅ^�ͽ�ֹ�^�������ڷŴ�^����ͬ�ӵĹ�������£��܉����ڷŴ�^��͌�ͨ�rҪ��ö࣬�Ķ�����ɹ��ӵ��^�Ȱl����p�ģ����˱���ʹܵēp�ģ���Ҫ��3���¹����_ͨ�r�M��vce�z�y���o���·�D��D3��ʾ��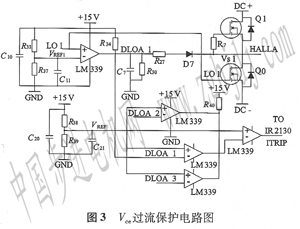 �Ե�һ����������LOl����ƽ(ʮ15 V)�_ͨM0sFET Qo�r��DLOAl��L01(+15 V)�c����늉�VREF1(+10 V)ͨ�^���^��LM339���^֮��ݔ�����(+15 V)���˕r�_ʼvce�z�y����MOsFET���ʹ�QO�_ͨ�r��VSL���λ(�����^1.4 V)����DLOAl(+15 V)���@ʹ�ö��O��D7��ͨ���˕r+15 V늉����Oͨ�^���R34R27���O��D7��MOsFET Q0��Դ�O��©�O�c+15 V늉�ؓ�O��ͨ�����MOsFET���ʹ�Q��o�����������tvce�ĉ����s��1.2 V�����O��D7�x��1N5819�����С��0.1 A�r�ĉ�����O.36 V����ôDLOAl��늉�׃�飺 �Ե�һ����������LOl����ƽ(ʮ15 V)�_ͨM0sFET Qo�r��DLOAl��L01(+15 V)�c����늉�VREF1(+10 V)ͨ�^���^��LM339���^֮��ݔ�����(+15 V)���˕r�_ʼvce�z�y����MOsFET���ʹ�QO�_ͨ�r��VSL���λ(�����^1.4 V)����DLOAl(+15 V)���@ʹ�ö��O��D7��ͨ���˕r+15 V늉����Oͨ�^���R34R27���O��D7��MOsFET Q0��Դ�O��©�O�c+15 V늉�ؓ�O��ͨ�����MOsFET���ʹ�Q��o�����������tvce�ĉ����s��1.2 V�����O��D7�x��1N5819�����С��0.1 A�r�ĉ�����O.36 V����ôDLOAl��늉�׃�飺  ����R34=5��1 k����R27=O 2 k��n���@�rVDLOA1(+2.12V)�c����늉�VREF�s+2.28 V)���^����MOsFET���ʹ�Q2��Q4�����������tVDLOA2����VDLOA3��С�څ���늉�VREF����ôݔ�����^�ĽY��ʹ��ITIRPݔ���ͣ���оƬ[R2130��ITIRP��͕r�f������������������ʹ�Qo��Q2��Q4��һ·�l�����ϣ�����QO�܉������^1 2 V�r���tʹVDLOA1���څ���늉�VREF����ôݔ�����^�ĽY��ʹ��ITIRPݔ���ߣ��f�����ʹܰl���˹��ϣ�IR2130��FAuLT�_ݔ�����ƽ���������P�����е�ݔ�����Ķ����o���á� ����R34=5��1 k����R27=O 2 k��n���@�rVDLOA1(+2.12V)�c����늉�VREF�s+2.28 V)���^����MOsFET���ʹ�Q2��Q4�����������tVDLOA2����VDLOA3��С�څ���늉�VREF����ôݔ�����^�ĽY��ʹ��ITIRPݔ���ͣ���оƬ[R2130��ITIRP��͕r�f������������������ʹ�Qo��Q2��Q4��һ·�l�����ϣ�����QO�܉������^1 2 V�r���tʹVDLOA1���څ���늉�VREF����ôݔ�����^�ĽY��ʹ��ITIRPݔ���ߣ��f�����ʹܰl���˹��ϣ�IR2130��FAuLT�_ݔ�����ƽ���������P�����е�ݔ�����Ķ����o���á�
2���Ʋ��Լ�ܛ���OӋ
2 1�D�Ӷ�λ�c�����@�M�Q��ԭ��
늙C�@�M�н��������D��늘дň������횸����D�����Ŵň�λ���M���{�����oˢֱ��늄әC��
Ч�ʺܴ�̶���ȡ�Q�ڃɂ��ň�������λ���Pϵ��ͨ�����û���λ�Â�������z�y�D�Ӵň�λ�ã����������Ի�����������λ����̖���F���_�Q���ԃ�����ͨ��������B�oˢֱ��늄әC�����f������ԭ��4]����λ�Â�����ݔ���ŘOλ����̖�����^�����·߉׃�Q������׃����ʹ�D2�еĹ����_�P��Q1��Q2��ͨ�����@�MA��Bͨ늣�A�MB�����˕r���D�Ӵň�������τ��D��형rᘷ����D�ӡ������ͨ·���飺�Դ���OһQ1-A���@�MһB���@�MQ2һ�Դؓ�O�����D���D�^60��늽Ƕȣ�����λ�Â�����ݔ����̖����߉׃�Q��ʹ�_�P��Q2��ֹ��Q4��ͨ���˕rQl�Ԍ�ͨ���t�@�MA��Cͨ늣�A�Mc�����˕r���D�Ӵň������ʹ�D���^�m��형rᘷ����D��.�����ͨ·���飺�Դ���OһQl A���@�Mһc���@�MһQ4һ�Դؓ�O��������ƣ����D��ÿ�D�^60��늽Ƕȕr�������_�P��֮�g�M��һ�ΓQ�������ӴŠ�B��׃һ�Ρ���Ҋ��늙C�������Š�B��ÿһ��B���ǃ�����ͨ��ÿ���@�M�����^����ĕr�g�ஔ���D�����D120��늽Ƕȣ�ÿ���_�P�ܵČ�ͨ�Ǟ�120��늽Ƕȡ�������ͨ��������B�oˢֱ��늄әC�������@�M�c���_�P�܌�ͨ�����Pϵ���1��ʾ��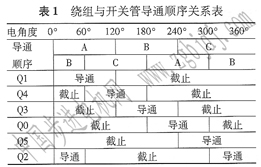
2 2ܛ���OӋ
���Ʋ��ֵ�ܛ����Ƕ��dsPIc30F4[)12�ij���惦���У���c�Z�Ԍ��F����Ҫ�����������Д��
���ӳ���ɲ��ֽM�ɡ�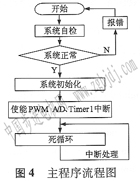
�D4���������У�ϵ�y��늱��M���_�Pλ�ü�늙C��B�șz�y���й��ϕr�͈��e����ϵ�y�����t ���ö˿�ݔ��ݔ������ʼ��ȫ��׃����Ȼ���{ �ø���ģ�K��ʼ����������ʹ��ģ�K��Ȼ���M���� ѭ�h�ȴ��Д��|�l��
�Д�����ӳ�����Ҫ�������r���Д��ӳ���ADc�D�Q�Д��ӳ���PwM�Д��ӳ�����Ҫ��ɫ@ȡ늙C�D��λ����̖�����Y��늙C������B���o�_��OVDcOND�Ĵ�����ֵ������6·PwM��ݔ���M����ɿ���늙C���_�D�ӡ������̈D��D5a��ʾ��ADc�Д���������ָ��ͷ���ֵ��Ӌ�㣻PIDӋ����Timerl���M�У�����ֵ�x�oPwMռ�ձȼĴ�����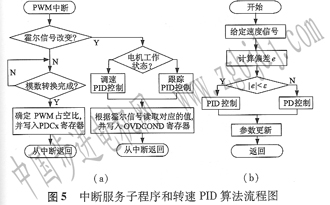
���{��ϵ�y�в��Ô���PID�㷨�����D���M�Ќ��п��ơ���ϵ�y�п��������OӋ���c�ǣ�������
�H��r�O��һ���`���ֵ������ۙ�`������ֵ�r��ȡ���e�ֿ������ã�����a���^���{�����������c�o��ֵ��ƫ��С���O���yֵ�r��Ͷ��e�ֿ������ã��������o�B�`����̈D��D5b��ʾ��
�������·���ɵĻ��A�ϣ��҂����OӋ�Ƴɵ��·���M���˜yԇ���yԇ�l���飺늙C�cֱ��ĸ��늉�����24 v��ؓ�d늙C��5 kw�oˢֱ��늄әC��PwM�ز��l�ʞ�20 kHz��
�D6a�錍�y��dsPIc30F4012ݔ��PwM�����^�r�gֵ��500 ns��ԓ���^�r�gͨ�^��ܛ�����O������������O��ֵ��500 ns����Ҋݔ���������Ҫ�D6b�錍�y��Il����2130ݔ��PwM�����^�r�g��2 .5��s��IR2130�Ԅ������ϡ���������������^�r�g��2��2.5��s������dsPIc30F4012ݔ�������^�r�gֵ500 ns����S�Y��ֵ��2��5��3��s.���Կ��������Y������Փֵ�ķ���֮�ȣ������OӋҪ��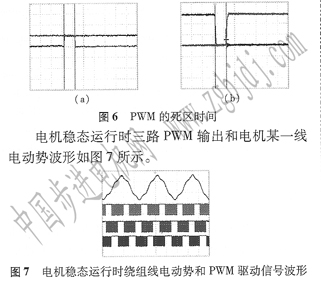
늙C���B�\�Еr��·PwMݔ����늙Cijһ��늄ӄݲ�����D7��ʾ��
ͨ�^�����Կ������OӋ��ȫ����Ҫ���`�C���˻���dsPIc30F4012��Ƭ�C�ğoˢֱ��늄әC����ϵ�y�����·���Ρ��{�����ܺá����ɔ_�ԏ����ɿ��Ըߡ������Ժá����܃r��ȸߵȃ��c��ϵ�y�m����С���ʟoˢ늄әC�Ŀ��ƣ�ͬ�r��Ҳ���ƏV���������I�����I����C�����C���˺�����ӵȡ�
|











