ժҪ����PMsM�ğoλ�ú͟o�ٶȂ����������(q��)�ӷ��棬��(g��u)����һ�N���ڻ�ģ׃�Y(ji��)��(g��u)��Փ�Ġ�B(t��i)�^�y����ͬ�r��ᘌ����y(t��ng)����������z�y��ĸ������z�y��ʽ�д��ڵIJ��㣬����(j��)�����������������һ�N���齛(j��ng)��(j��)������������z�y��������(y��ng)����PMsMʸ������ϵ�y(t��ng)�У��ܜ�(zh��n)�_��Ч�ع�����D(zhu��n)�Ӵ��λ�ýǡ������TMS320c24x�(y��n)�C�˙z�y�Ϳ��Ʒ��������_�١�
�P(gu��n)�I�~��Ԫλ�Â�������DsP��Pl��sM����ģ�^�y��������z�y
�ЈD���̖��TM34l��TM351 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7{��18f2009)10һIJll37��03
0�� ��
����(j��)늙C(j��)���w�IJ����׃��������ʽ�IJ�ͬ����ӓQ�������ͬ��늄әC(j��)���Է֞鷽��ʽֱ���oˢ늄әC(j��)������ʽ����ͬ��늄әC(j��)���oˢֱ��늄әC(j��)�c120�㌧(d��o)ͨ��������׃����ƥ�䣬�Ɍ�(sh��)�F(xi��n)�������(q��)�ӣ����D(zhu��n)��λ�Â�����ֻ��Ҫ�ṩ�D(zhu��n)�������P(gu��n)�Iλ�õ��xɢ��̖��������늙C(j��)���ƺ��Σ����������@�M�ʸ��ԣ���ӓQ��r���a(ch��n)������}�ӣ��M(j��n)������늙C(j��)���D(zhu��n)���}��1������
ʽPMsM���Ʒ�ʽ�`��c180�㌧(d��o)ͨ����׃��ƥ�䣬�Ɍ�(sh��)�F(xi��n)���Ҳ��(q��)�ӣ�����ň������ʸ�����ƿ��Ʋ��Կ���Ч�����p�D(zhu��n)���C�������Ѓ�(y��u)�����{(di��o)�����ܣ�����ʸ����������Ҫ�@ȡ�B�m(x��)�ġ����_���D(zhu��n)�Ӵ��λ����Ϣ���������ϵ�y(t��ng)�Ľ�(j��ng)��(j��)�ԺͿɿ��ԣ�ϵ�y(t��ng)���ßoλ�Â��������ƣ�Ҳ��������늙C(j��)�@�M�����P(gu��n)���̖ͨ�^�m��(d��ng)�㷨��Ӌ(j��)���D(zhu��n)��λ�ú��ٶȣ�����ܛ����(sh��)�F(xi��n)�Ĵ���^�y��ȡ��λ�Â�������
��ʹ?f��n)�B(t��i)�^�y���е�λ���^�y�㷨�����λ�������_�ɿ����ͱ�회�늙C(j��)�@�M�е�������^�y��
ݔ������һ����(zh��n)�_��Ҫ�����늙C(j��)�@�M�������̖�ęz�y��������Ҫ��
1 PMsM�ğoλ�Â���������
Habetler����Ŀ��gʸ���{(di��o)�Ʒ����ڮ���늙C(j��)�����ЏV���đ�(y��ng)�ã�ʸ�����Ƽ��g(sh��)ͬ��Ҳ�m������
��ͬ��늄әC(j��)��׃�l���ơ�PMsMһ��ͨ�^�z�y늙C(j��)�D(zhu��n)�Ӵ��λ�Á����ƶ��������늉���ʹ���Ӻ��D(zhu��n)�Ӵńӄݱ��ִ_������λ�P(gu��n)ϵ���Ķ��a(ch��n)���㶨���D(zhu��n)�ء�
����PMsM�D(zhu��n)�Ӵ�ͨλ���c�D(zhu��n)�әC(j��)еλ����һ�µģ��҂�ͨ�^�z�y�D(zhu��n)�ӵČ�(sh��)�Hλ�þͿ��Ե�֪
늙C(j��)�D(zhu��n)�Ӵ��λ�á����y(t��ng)PMsM��������õī@ȡ�D(zhu��n)��λ�ú��ٶ���̖�ķ��������D(zhu��n)�S�ϰ��b��������������ϵ�y(t��ng)���û�ģ��B(t��i)�^�y��ȡ��λ�Â�������ͨ�^�m��(d��ng)�㷨������D(zhu��n)��λ�ú��ٶȡ��^�y��ģ����Dl��ʾ��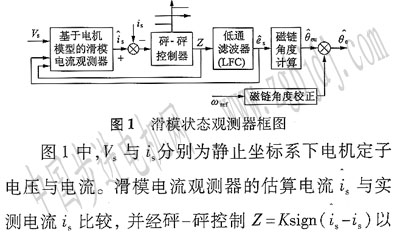
�m��ģ�ͣ��m��(d��ng)?sh��)��x��K����(sh��)��Ӌ(j��)��늄ݣ���ʹ��Ӌ(j��)����͌�(sh��)�y������Ǻϡ�����^�y��ģ�Ϳɱ�
ʾ��2��

�ڦ����o ֹ����(bi��o)ϵ�£��քe�ئ��ͦ��S�ֽ��ɱ��_(d��)����
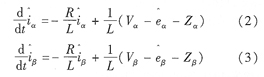
ʽ1���xɢ���_(d��)ʽ��
��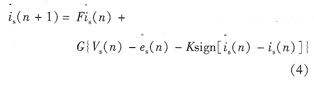  һ�A��ͨ�V����(LPF)�V���õ� һ�A��ͨ�V����(LPF)�V���õ�

ϵ�y(t��ng)���\(y��n)��TMs420F240x DsP�ĸ����\(y��n)������������늄әC(j��)�ĸ�Ч�����������@���D(zhu��n)�ӵ�λ��
���ٶ���̖����(sh��)�F(xi��n)�o�������Q����ٶȡ�������]�h(hu��n)���ơ�ϵ�y(t��ng)���ƿ�D��D2��ʾ3��
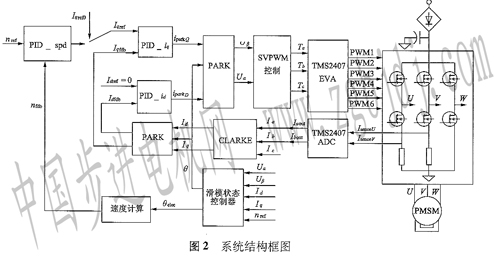
2����z�y��ʽ
����׃�·�Ŀ����У����˫@ȡ������������̖�����y(t��ng)������z�y�b����ֱ���������������
�߲�����·����ɘ��\(y��n)���·�������mȻ���\(y��n)�㺆�Ρ����ƿɿ������c(di��n)�����Ǜ]�н�(j��ng)��(j��)�Կ��ԡ����˽��ͳɱ��ͺ����·����������˲ɼ�ֱ����(c��)ĸ�������̖�����㽻����(c��)�������ֵ���@�N������������ͨ���˂��_�P(gu��n)��B(t��i)(sa��sb��sc)�г�(O��O��O)��(1��l��1)������������_�P(gu��n)��B(t��i)�£�ֱ��ĸ�������Ϣ������(y��ng)����6��c��ijһ·�����ֵ���@�N�z�y��ʽ�ܺ���Ӳ���·����������ܛ��̎����ؓ(f��)��(d��n)������Ҫ��һ��PwM���ڃ�(n��i)�z�y�ɴ������̖�����҃ɴΙz�y�c(di��n)��횷քe����(y��ng)�ڲ�ͬ�ăɷN�_�P(gu��n)��B(t��i)���g����ˣ���AD�D(zhu��n)�QоƬ�IJɘӺ��D(zhu��n)�Q�ٶ�Ҫ��ܸߣ��������Д�������r����Ҫ���Д���̎�Ŀ��gʸ���^(q��)�g���@��Ҳ���y�����m�r�ԡ����ľC������ɷN����z�y��ʽ�ă�(y��u)�c(di��n)���z�yU����V����������ٸ���(j��)������������������õ�W�����ֵ��
UV���������_�P(gu��n)��_T4��T6��s���_�cֱ����֮�g�քe����һ��100 m���IJɘ���裬�ɘ���̖Usense�cVsense�քe��(j��ng)�\(y��n)��Ŵ���LMV324�Ŵ�lO��������ɘӵ����IsenseuIsensev�Լ��^�����o(h��)�·��ݔ����̖IsenseUPT�cIsenseVPT����z�y�·��D3��ʾ��
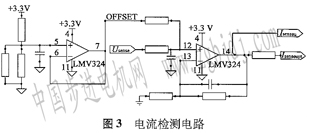
�ɘ����R1�cR2�O(sh��)��u��V�����ۣ���(d��ng)����P(gu��n)���r�͟o���ɘ�����������˽�Q�@�����}����ܛ���O(sh��)Ӌ(j��)�ĕr���������Д࣬������ɘӵ��΄�(w��)������һ��PwM���ڵ��_ʼ̎���ڱ��^ƥ�䵽��֮ǰ�����g��U��V������Ϙ�۶����P(gu��n)��ģ�Ҳ�����f����nj�(d��o)ͨ�ģ��@�ӾͿ�����ÿ��PwM��������ɘ�һ�ɂ������ֵ��
�҂�ֻҪ֪��u����u�£��Ϳ���֪��ݔ��늉�ʸ��uout�����ȅ^(q��)���M(j��n)��֪��uout������(y��ng)�ăɂ���Ҫ����ʸ���Լ����ƕr�gT1��T2���O(sh��)ݔ��늉�ʸ��uout̎�����ȅ^(q��)����D4��ʾ�� ��һ��PwM�����u0��u60�քe����T1��T2�@���ȅ^(q��)��(n��i)����4�N������B(t��i)ʸ��������u0��u60����ɂ���Ҫ����ʸ��������һ��PwM���ڵ���ʼ�ͽY(ji��)β̎��������ʸ����(000����sVPwM��̖�r����D5��ʾ�� ��һ��PwM�����u0��u60�քe����T1��T2�@���ȅ^(q��)��(n��i)����4�N������B(t��i)ʸ��������u0��u60����ɂ���Ҫ����ʸ��������һ��PwM���ڵ���ʼ�ͽY(ji��)β̎��������ʸ����(000����sVPwM��̖�r����D5��ʾ��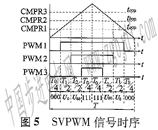
�ɿ�����ʸ���cu0ʸ���r���������ģ�����PwM�����_ʼ�����б��^ƥ��֮ǰ��ݔ��������ʸ����
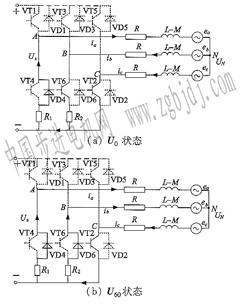
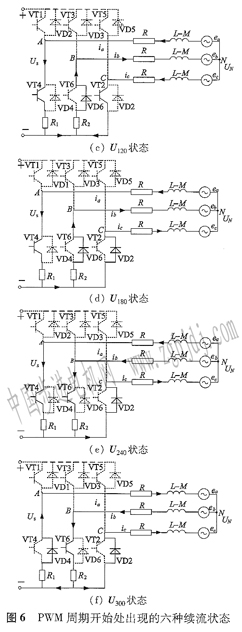
��?y��n)�늙C(j��)�@�M��Ȧ�ʸ��ԣ���Ȧ�ϵ����������ͻ׃����ˏ�ʸ��u���D(zhu��n)�Q����ʸ�����䌦��(y��ng)�Ĺ�����B(t��i)�D(zhu��n)�Q��D6a��ʾ�����ж��O�������m(x��)�����ã��˕r����۲ɘ���������^����������������ÿ��PwM����ǰ��ͨ�^��۵IJɘ����z�y������ǿ��еġ�
3��(sh��)�(y��n)�Y(ji��)��
��(sh��)�(y��n)Ӳ��������Ҫ�������c����_�P(gu��n)�Q�����·��оƬ����Դ������z�y�·����̖̎�����(q��)���·�����s�C(j��)ؓ(f��)�d�ȽM�ɡ�
�D7������z�yֵ��(j��ng)3��2����(bi��o)׃�Q���ڦ��������oֹ����(bi��o)ϵ���c��B(t��i)�^�y����������Č��Ȳ��Ρ��ĈD�п��Կ������������i���^�õ�ۙ����(sh��)�H���i�������й������������(sh��)�Hֵ������ʎ�ǻ�
ģ�^�y�����еĶ���F(xi��n)�D8��ʾ��λ�Â������@�õ��D(zhu��n)�Ӵ��λ�Ì�(sh��)�y��8�c�oλ�Â������㷨�@�õ��D(zhu��n)�Ӵ��λ�ù���Ǧȣ��ĈD�п��Կ���������ǶȺ͌�(sh��)�H�Ƕ���λ��һ�µġ��D7�c�D8�(y��n)�C������z�y�·�͟oλ�Â������㷨�Ĝ�(zh��n)�_���c�ɿ��ԡ� 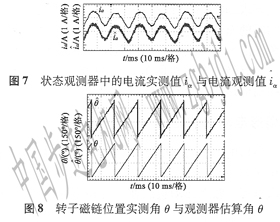
4. �Y(ji��)�Z
������z�y�����Լ��o�������㷨��׃�l�������ϵ�y(t��ng)�ϵČ�(sh��)�(y��n)��(y��ng)���У�ϵ�y(t��ng)���H���пɿ��Ըߣ�푑�(y��ng)�ٶȿ�ă�(y��u)���{(di��o)�����ܣ�ͬ�r �����\(y��n)��Ч�ʸߡ��C��С�����͵����c(di��n)�����ԏV����(y��ng)���ھGɫ����� ��
|











