ժҪ�������һ�N�����Xһ���۽Y�����p�D��ģ�B�D�Q�ͳ���늄әC�������������Xһ���۽Y��������մ����ӵĿv����D�Q���X�ď�����Ӂ����D�����D����늙C����أģ���M���˷�������������{�����l�ʡ�Ӌ���X����D�Q�ȡ������b���`��Ӱ푡�Ӌ�㶨�ӱ����|�c܉�E����ͨ�^�������D�ӽ��|�ĺ���ģ�ͣ���늙C���C���B�µ�ݔ�������M��Ӌ����������˳ߴ���8mm��10mm�әC������������늙C�B�m�\�D�������ã�����늉���135 V�r���D����_475 r��min��
�P�I�~������늄әC��ģ�B�D�Q���p�D�ӣ�����Ԫ�����|
O�� ��
����늄әC�����É�늲��ϵ��扺�Ч���Ƴɵ������������ɶ��ӡ��D���Լ�ʩ���A�����ęC���Ȳ������ɡ��ډ���մ���ʩ�ӳ��l��׃늉������ڶ��ӱ���a������ӣ�ͨ�^�����c�D��֮�g��Ħ�������D���\��
����늄әC�ѽ��ɹ����������C�Ԅ��{�����O�侫�ܶ�λ���Լ���܇�����졢�C���˺��t���O���С������꣬�S���Cе����ӵ���ٰlչ������늙C������Խ��Խ�ࣺ���ڳ���늄әC�ĽY�����ӡ��`�����늙C�Ј��и��аlչǰ��һ
ģ�B�D�Q��늙C��һ�Nᘌ������ء���һ��ͬ����������ij���늄әC������ģ�B�D�Q�C����
�a�������D�����D�����ģ�Bһ����r�£���������Դ����Ӳ��ÙC��D�Q�����^�ߵĿv����
����ɣ�����ģ�B�D�Q��늙C���D�QЧ���^�ߣ��m�ڴ���ݔ��.
ģ�B�D�Q��늙C����Ҫ���������ģ�B���D�Q�C���Ͷ��ӌ��D�ӵē܄әC��.����ģ�B�D�Q���
�C�����ģ�B�ӣ�����䶨���Ӷ�܉�Eδ�ؾ���һ���E�A�������ǙE�A��һ�N׃�Ρ���������@�N׃�ε�܉�E���ŷ���ʹ�D���c����֮�g���������Ӝp�٣�����ˌ��HЧ�ʡ�
1985��kkio Kumada�����һ�N�����Ͼ��І����Y����ģ�B�D�Q��늙C������ʹ��늶ѵĿv��
����D��������Ť�D��ӡ�
�������c�D�ӽ��|�������������������A��W�W����Ҍ�AkioKumada���OӋ���˸��M
�OӋ�����Ͼ��������Y����늙C�����@�N�OӋ��Ч�ؽ�������������˷����ԣ���ȱ�c�Ǽӹ���ˇ���s������1996�����OӋ��һ�N�����Ͼ����p���Y����늙C����ͨ�^����մɶѵĿv��Ӂ����l�������p����ij�N���l������ӣ����Ƅ��D�����D��
���������W�ڶ����ϰ����������Ƭ�팍�Fģ�B�D�Q�����о������Ƭ���D��Ħ�����|���\��܉�E�̈́����W������ָ�����Ƭ�c�D���S��ƽ�ЕrĦ����****��늙C����****���㽭��W������һ
�Nб�X�v���ͳ���늄әC���ڶ��ӱ���������ֲ���50�㡫70���б�X��ԓ늙C�����ڶ��ӱ����б�X�c�D�ӵ�����o��ʹб�X�����|�c�a���E�A�\�ӣ����F�D�ӆη������D�\�ӡ�
���������һ�N�����Xһ���۽Y�����p�D��ģ�B�D�Q�ͳ���늄әC��������늙C������Ԫģ�ͣ������M���˷����������ͨ�^�������D�ӽ��|�ĺ���ģ�ͣ���늙C���C���B�µ�ݔ�������M����Ӌ�㡣
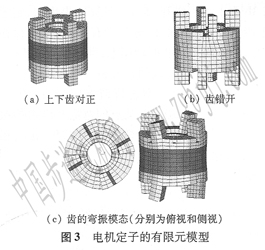
1늙C�Ļ����Y������ԭ��
ԓ늙C��Ƭ�����Ķ��ӽY����D1��ʾ�����ӽ����w���O���Ă������Xһ��������ģ�B�D�Q���
�C�����r���o����մ�����ʩ�ӆ������ҽ�׃늉���ͨ�^�����Xһ���۵�ģ�B�D�Q�����ӵĿv����D�����X�ď�����ӣ��γ��v���E�A�\�ӣ����D�����D����D2��ʾ��
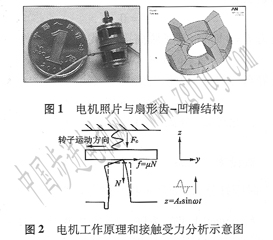
Ȧ2늙C����ԭ���ͽ��|��������ʾ��D
���е�б�X��Y���\�Еr�X���ה��ѣ����֮�£������X��Y�������^�ߣ����ה��ѣ������ڼӹ������X���㲿���а��ۣ�ʹ���X�ڰ���һ�ȵľֲ�����׃С���X�������۷������������������X�ď��������
Ŀǰ���е�ģ�B�D�Q��늙C������D�ӽY���������Mһ�����ݔ��Ч�ʣ����IJ������p�D�ӽY�����ڶ��Ӄɶ˾��Ў������X���۵Ľ����w���D�ӡ�늙C�ɉ���մɿv���ӡ����Ӄɶ˽����w���ɶ��D�ӡ��D�S�Լ��A�o�C���M�ɡ�
���ӵĽ����w�OӋ�Ѓ��ݼy��ͨ�^�����ݗUʹ�ɶ˽����w�A�o���g�ĉ���մɿv���ӣ��γ���֮
�f�ĊA�ĽY���������˲���ճ�Y��������ճ�Y���ϻ��Ȇ��}���S���^�ݗU�ף�����ĸ�Q�o���ɽo�ɶ��D��ʩ���A���������䉺�o���X�Ķ��档
2늙C�������
2 1늙C���ӵ����l���{��
늙C���ӵęC��������Ԫģ����D3��ʾ�����Ѓɶ��{�Gɫ�������X��Y����������45̖䓣�
���g��ɫ�����ǃ�Ƭ��ͨ����մ�Ƭ��
ԓģ�ʹ���ÿ���X��������һ�µ����ģ�B����D3c��ʾ��늙C�����l�ʑ�ȡ���Ե���ԓģ
�B���l��(������ԓ�l�ʣ��X�t�ஔ�ڸ���)������늙C�����˿v���Ӟ�����Դ������������������M�����{���X�ď���ģ�B�l��ʹ֮�c���ӵĿv���ģ�B�l��һ�¡�
���ӿv���ģ�B�l����Ҫȡ�Q�ڶ��ӵĸ߶ȣ����о���Ҫ����ֱ���߶Ⱦ���8 mm����˶��ӿv
��ģ�B�l���ǹ̶�ֵ�����X����ģ�B�l��Ӱ��^��ą������X�ĸ߶ȣ�����ֻӋ���X�ď���ģ�B�l���S�X�ߵ�׃����
Ӌ��Y����D4 ��ʾ��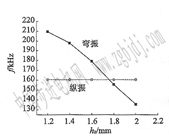
���Կ������S �X�ߵ����ӣ��X����ģ�B�l����u�pС�� �����ӿv��ģ�B�l�� ��������160 kHz�� ׃�����X�ߞ�l.8 mm�D4��׃�X�ߌ������l�ʵ�Ӱ푕r���X����ģ�B�l���c���ӿv��ģ�B�l�ʎ���ȣ���ˌ��X�߶���1.8 mm��
2 2�X������D�Q��Ӌ��
���x�X�ď���ģ�B������D�Q�Ȟ�c=B��֮A��A���X����ij�c�ď������B���X�ײ���ij�c��
�v�����A��B�ı�ֵ�܉�ӳ�����Xһ���۽Y��������D�Q������
�����X�ĽY�����D�Q��c���X��Ӱ�****��Ӌ��Y����D5��ʾ��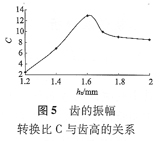
�ɈD5��֪�����X����1��2 mm
��1��6 mm��������u���ӕr��c������������X�ߴ���l.6 mm�r��cƽ���½���ԭ���Ǯ��X���^�ߕr���X�ĸ���Ч��׃����������Ч�،��v���D�Q���X�ď���c****ֵ��13�����f��ԓ�Nģ�B�D�Q�Y���Ѓ����Č��v����D�����Ŵ���X�ď�����ӵ�������
2��3�����X�ǶȲ늙C�l�ʵ�Ӱ�
�ڌ��H�b��r���������¶�����X���e�_һ���ĽǶȡ���˽��������X�e�_�Ķ�������Ԫģ��(�D3b�������X�e�_15��)��Ӌ��Y�����������ӵ������X�e�_��늙C��ģ�B���]��Ӱ푣���Ȼ����ÿ
���X��������һ�µ����ģ�B�����C���l�ʲ���׃��
2��4���ӱ����|�c�\��܉�E����
ͨ�^������Ԫģ���M���C푑�����(늉�20V)������Ӌ����X������ij�c�ď���Ϳv������
�Լ���λ��Ӌ��Y���飺�������1.91��m����λ50��7�㣬�v�����O��5��m����λ61.O�㡣�����������λ����Ӌ���ԓ�c��һ������T�ȵ�܉�E����D6��ʾ�����Կ������X���\��܉�E��һ������ĈD6�����X߅ij�c���\��܉�E�Aб�E�A��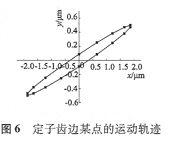
3늙C���D�ӽ��|�����Ͷ���ݔ�����ط���
Ӌ��
����ݔ������Ӌ��r�迼�]���D�ӵĽ��|������r���M�����в���Ť�v�v������늄әC�Ľ��|
ģ�ͣ��ڴ���Ȼ������늙C�������c���b��Y�������º������O��ͨ�^һ��������p���ɉ����D
����ʩ���A���������ɵď���ϵ����k����ʼ��B�ď���׃������c�����]��늙C����ˮƽ���ã��������������Ӻ��D�ӵĄ���ϵ���h�����A�o���ɣ���˶��ӵ��X���D�ӽ��|�r�����Զ��Ӻ��D����D����ɵ���׃������ˮƽ�ʹ�ֱ�����\�ӵ���ϡ������������������Ҳ����䲨���c�l�ʲ����c�D�ӽ��|��Ӱ푡����|ģ����D2��ʾ��
�ڶ������v��ӵ�һ������T�ȣ�����r���_ʼ���Xͬ�r��y�Sؓ����ď�����Ӻ�Z�S������
�Ŀv��ӣ��X����Aб���H��һ�l߅�c�D������|���܄��D�����D�����O�D�ӌ�ԓ���|߅�ĉ�����F���D�ӌ��X��Ħ������f0��Ħ������ʽ�У�
f=��F (1)
�OFc�鏗�Ɍ��D�ӵ��A������z�鶨�D�ӽ��|߅�Ŀv��λ�ơ����O���|߅�Ŀv�����Az����ôt
�r��ԓ߅�v��λ��z=A��sin��t������A�����飺
Fc=һk(z+c)=- k(Azsin ��t+c) (2)
�����Ă��Xͬ�r��ԓ�D�����ã��OF���F�ķ������������X���D�ӵ�֧�������Om���D���|����a
���D�Ӽ��ٶȣ��D�ӵ��������̞飺
4F��+Fc=ma (3)
���D�ӽ��|�r���ٶ���ͬ����ô��

����ʽ(3)����D�ӌ��X���|߅�ĉ����飺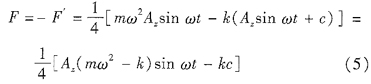
�D�ӌ��X��Ħ�����飺

��ʼ��B��
f=0 (6)
����F=O�r�����D��Ó�x���|���õ����x�l����

�O�o�B�r���A����****ֵ��Fc0ʽ(7)����

�ɴ˿�֪�����x�r�gf�c�o�B�r�A����Fc0���P��
�B���ڌ��H�\���У�����A�����^С����ô���D�ӱ��^����x����Ч�ʲ��ߣ�����A�����^����ô���D�ӱ㲻���ڷ��x���X����K�D�����D��
�������ƌ����Կ�������늙C�\�Еr�����ӌ��D�ӵ������Լ��A����Fc��ֵ���Dz��ӵģ������l
�ʺ���λ���c�X���|߅�Ŀv���һ�¡������X�Ŀv���AZ�hС�ڏ��ɳ�ʼ��׃c�����Fc���ӵķ�ֵ
�ஔС���Еr�����J���A����������׃�����������ӵķ�ֵ�c�o�B�A���������ȣ���Ŀ�����g��ģ�������r�´�����0���ķ�֮T���ڃȡ�
�����D�ӵđT���D�ص����أ��D�ӵ�ݔ�����ز���������һ�����g��ģ�������ij���̶�ֵ��
�����ӣ��䲨�ӵ��l�ʺ���λͬ���ӿv���һ�£�
��������ģ�ͺ��ƌ������Ժ��ε��É���F��Ħ����f�������D�ӌ����ӵ�ȫ�����ã�Ӌ�㶨�ӌ��D�ӵ�****ݔ�����أ��Ķ�������s�Ľ��|Ӌ�㡣
������Ԫ�����������ֱ�Ӽ��چ�Ԫ�ϣ��ʌ�����Ԫģ��ÿ���X�Ķ��D�ӽ��|߅�����І�Ԫ��ʩ�Ӊ���FS������Ħ����FS����D8��ʾ��
���O����F��Ħ����f���X�Ľ��|߅ƽ���ֲ���ģ���І��X�Ľ��|߅����5����Ԫ���У�
��늉��̶���60 v�����l�ʞ�150 kHz��Ӌ���X��������SĦ����fS�͉���FS��׃����Ӌ��Y����D9��ʾ��
�ĈD�п��Կ������S��Ħ����fS�������X�ď���������ԜpС����Ħ����fS��0.018 N�r���X�ď�������ӽ��㣬�˕rĦ���������X���D�ӵ�****Ħ���������X���D�ӵ�ݔ���D�؞���|߅���傀��Ԫ���D��֮�ͣ��У�
 ����늙C���p�D�ӽY����һ����8���X������ݔ�����أ� ����늙C���p�D�ӽY����һ����8���X������ݔ�����أ�
 ����Ӌ��r늉���60 v�������H늉����Լӵ�200V��������ԓ늙C��ݔ��������Փ�ϑ�ԓ����3 mN��m�� ����Ӌ��r늉���60 v�������H늉����Լӵ�200V��������ԓ늙C��ݔ��������Փ�ϑ�ԓ����3 mN��m��
4���
��������ĘәC�ߴ���8 mm��10 mm�����l��148 kHz����ԓ�l����늙C�\��ƽ�����B�m�\�D�������á����÷ǽ��|�D�ٜy���x��늙C�D���S늉���ֵ��׃���Pϵ�M�Мyԇ���y���Y����DlO��ʾ��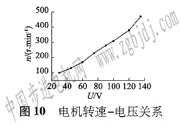
���Կ������S��늉�������늙C�D�پ�������������늉���135 V�r���D�ٞ�475 r��min��
5�Y�Z
���������һ�N�����p�D��ģ�B�D�Q��늙C���OӋ�˶����ϵ������Xһ����ģ�B�D�Q�Y������ᘌ�늙C������Ԫģ���M���˷����о�������Y��������
(1)���X�ߞ�1.8 mm�r��늙C���ӿv���ģ�B�l�ʺ��X����ģ�B�l��һ�£����������������
(2)Ӌ���X�ߌ�����D�Q�ȵ�Ӱ푣�ԓ�N�Y����****�D�Q�Ȟ�13����
(3)�C���b��r���¶�����X�e�_�����ӵ����ģ�B���oӰ푡�
(4)Ӌ��������X�������C���B�µ��\��܉�E����һ����ăAб�E�A��
(5)�������D�ӵĺ������|ģ�ͣ�ָ����늙C�\�Еr�����A���������ӌ��D�ӵ���Ħ�������c�v
���ӵ������ͬ�l��ͬ��λ�IJ��ӡ�������ģ��Ӌ������ӌ��D�ӵ�****ݔ�����ء�����Ӌ��錍�Ժ��Mһ���о��ṩ����Փ�������������һ�_�ߴ���8 mm��10 mm�әC�����^��������늙C�\��ƽ�����B�m�\�D�������á�����늉���135 v�r���D�ٿ��_475 r��min��
|











