�F(xi��n)�������ŷ�ϵ�y(t��ng)�����_(d��)�쾀�(q��)��(d��ng)ϵ�y(t��ng)�еđ�(y��ng)��
���_(d��)��һ�N���ßo(w��)��늲���̽�y(c��)Ŀ��(bi��o)���O(sh��)�䡣���������аl(f��)��o(w��)��늲���Ҳ���Խ���Ŀ��(bi��o)�đ�(y��ng)����̖(h��o)����������Ŀ��(bi��o)���ҽ��յ�����Ŀ��(bi��o)�ğo(w��)��늲������_(d��)���΄�(w��)���DZ���Ԅ�(d��ng)�ظ�ۙ��������Ŀ��(bi��o)������Ŀ��(bi��o)���Ԅ�(d��ng)��ۙĿ��(bi��o)���ǽ������(q��)��(d��ng)���_(d��)�쾀�����^���_(d��)�ŷ�ϵ�y(t��ng)�팍(sh��)�F(xi��n)�ġ����_(d��)�쾀�ŷ��(q��)��(d��ng)ϵ�y(t��ng)�Y(ji��)��(g��u)ʾ��D��D9��9��ʾ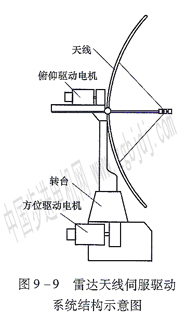
���^�Ԅ�(d��ng)��ۙĿ��(bi��o)�����Dz���Ŀ��(bi��o)��ʲô�ӵ���_�ȡ����ٶȺ�܉�E�\(y��n)��(d��ng)�����_(d��)�쾀���S��ʼ�K�ܾ��_�،�(du��)��(zh��n)Ŀ��(bi��o)�����_(d��)���ՙC(j��)���յ�Ŀ��(bi��o)�Ļز���̖(h��o)���Йz�y(c��)����λ�������IJ�֧·��̖(h��o)���͵��ŷ�ϵ�y(t��ng)�ŷ�ϵ�y(t��ng)�(q��)��(d��ng)�쾀���SĿ��(bi��o)����ô�����_(d��)������Ŀ��(bi��o)�r(sh��)�������ɲ����ˆT�Ƅ�(d��ng)�ٿv�U�o��Ŀ��(bi��o)λ�ã����ɹ�W(xu��)�O(sh��)��o��λ����̖(h��o)���������_(d��)Ӌ(j��)��C(j��)�o��Ŀ��(bi��o)λ�ã�����Ŀ��(bi��o)λ����̖(h��o)���c�(q��)��(d��ng)ϵ�y(t��ng)�z�y(c��)�����_(d��)���쾀λ����̖(h��o)�����^���γ�λ���`����̖(h��o)����(j��ng)�^�Ŵ�̎�����τ�(d��ng)���_(d��)�쾀�\(y��n)��(d��ng)��ʹ���_(d��)�쾀���S���Ԅ�(d��ng)��ۙĿ��(bi��o)����(du��)��(zh��n)Ŀ��(bi��o)�����_(d��)�쾀λ���ŷ�ϵ�y(t��ng)��ԭ����D��
�D9һ10��ʾ��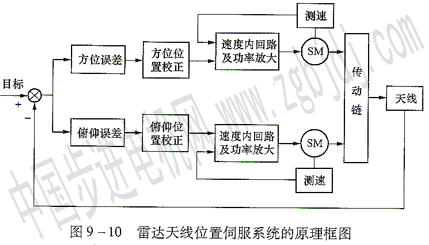
����(j��)ݔ����̖(h��o)�����c(di��n)�����_(d��)�쾀�(q��)��(d��ng)ϵ�y(t��ng)�ɷ֞鶨ֵ�{(di��o)��(ji��)ϵ�y(t��ng)���������ϵ�y(t��ng)���S��(d��ng)ϵ�y(t��ng)�����ߵ�ݔ��������׃������Ҏ(gu��)�����ȟo(w��)����(zh��n)�_֪�����@�Nϵ�y(t��ng)ͨ���Q�����_(d��)�S��(d��ng)ϵ�y(t��ng)��Ҳ��һ�N�ŷ�ϵ�y(t��ng)�����乤��ԭ�����Կ��������_(d��)�ŷ�ϵ�y(t��ng)������(g��)���_(d��)�b�õ���Ҫ�M�ɲ��֣�����(du��)�ڰl(f��)�F(xi��n)Ŀ��(bi��o)����ۙĿ��(bi��o)�����_�y(c��)��Ŀ��(bi��o)��λ�õȾ�������Ҫ���ã�ֱ��Ӱ푵����_(d��)�b�õ����ܡ�
���_(d��)��(y��ng)�����S���I(l��ng)��������^�y(c��)�Ě������_(d��)��Ş���õ�Ş�d���_(d��)���w�C(j��)�ęC(j��)�d���_(d��)������������յľ������_(d��)�����ڌ�(d��o)������(d��o)�^�����_(d��)�ȡ����@Щ�b�ü���(d��o)���l(f��)���b�á�ͨ���õ��l(w��i)�Ǹ�ۙϵ�y(t��ng)����������������h(yu��n)�R�ȑ�(y��ng)���У���Ҫ���ŷ�ϵ�y(t��ng)�܌�(sh��)�F(xi��n)��λ�ǿ��ƺ����ǿ��ƣ���(du��)�ڲ�ͬ�đ�(y��ng)�È�(ch��ng)�϶��������������Ҫ��
�ŷ�ϵ�y(t��ng)�ܾ��_��ۙĿ��(bi��o)�O(sh��)���ķ�λ�Ǻ����ǣ����Ҿ����^��(qi��ng)�Ŀ��_��(d��ng)�������������@Щ�ŷ�ϵ�y(t��ng)��(y��ng)���ڲ�ͬ��(ch��ng)�ϣ���Ҫ��Ă�(c��)���c(di��n)��ָ��(bi��o)�ߵ�Ҳ���M��ͬ���@Ҫᘌ�(du��)���w��r���O(sh��)Ӌ(j��)���x�����m��(y��ng)���ŷ�ϵ�y(t��ng)��
|











