������60���ĩ�d���һ�N����Դ���V�������ڸ������档���c��ͨ��Ⱦ����S���������ܣ�
1���߶������
��ɲ���ָ�ɂ�������ͬ������ͬ�l�ʺ���λ����ͬ�IJ�����ͨ��Դ���lݗ��⣬�Ƿ���ɹ⡣�������ܼ�ݗ��⣬���и߶ȵ�����ԡ�
2�������Ժ�
��ͨ��������˷��l�⣬���ļ������l�����ļ��⣬��lɢ�Ǻ�С�����c�������ķ����R�洹ֱ���������m���Ĺ�W��ֱϵ�y����lɢ�ǿ�С��10��-4�η�rad����һ��ƽ�й⡣
3�߶Ȇ�ɫ��
��ͨ��Դ�����S�ನ�L�����Ծ��ж�N�ɫ�����չ�����t���ȡ��S���G�����{�����߷N�ɫ�����������L��380��760mm������Ć�ɫ�Ըߣ��纤�ʼ�����V������ֻ��10��-6�η�nm
4�����ȸ�
���ڼ������Oխ��������Ч���ʺ��ն��e�ߡ�
���ڼ������������ԣ�����V���������L���x���߾��ȵ�λ�Ùz�y��
�ڸ߾��ȵ�ĥ�����M�������˜y���C�ϣ�Ҫ���и߾��ȵęC��λ�Ùz�y�b�ü���λϵ�y���˕r����ʹ���p�l�������x����C���Ĝy���b�ã����ھ��ܙC���ϣ��߾��ȵ��p�l�������y��ϵ�y�Ǿ���λ�Üy���ěQ�������ء��������c��B�p�l�������x�Ĺ���ԭ�����p�l�������x�����ù�ĸ���ԭ���Ͷ�����Ч�����M��λ�Ùz�y�ġ�
������淨�y��ԭ����
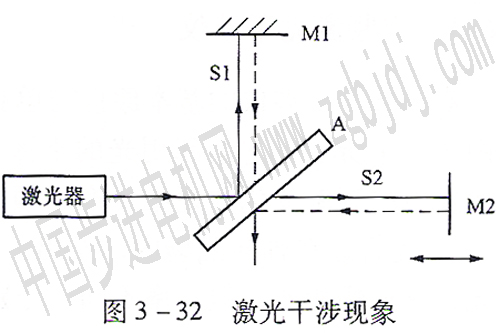
������ĸ���ԭ�������о��й̶���λ���������ͬ�l�ʡ���ͬ����ӷ������ӷ���֮�g�A�Ǻ�С�Ĺ�����B�������a������F����D3��32���ɼ������l��ļ��⽛�ֹ��RA�ֳɷ������s1�������s2���ɹ����քe�ɹ̶������RM1�ͿɄӷ����RM2������������ڷֹ��R̎�R�ϳ���ɹ�������й�sl��s2��·�̲��N��(�˞鲨�L��N�����������)�����H�ϳɹ������ǃɂ������֮�ͣ��⏊****����D3��33a��ʾ����s1��s2��·�̲��NA��2(��벨�L���攵��)�r���ϳɹ������͞��㣬��D3��33b��ʾ���˕r���⏊��С��
���������x���������@һԭ��ʹ�������a���������g�ĸ���l�y���ɹ���D�QԪ�����ܲ��D�Q�����̖�����^̎������Ӌ����Ӌ�����Ķ����F��λ�����ęz�y���ڼ���IJ��L�O�̣��e��
����Ć�ɫ�Ժã��䲨�Lֵ�ܜʴ_�����������淨�y��ķֱ������ٞ�ˣ�2�����ìF����Ӽ��g߀�ɜy��0��01�������l�y����ˣ��ù���淨�y��ľ��ȘO�ߡ��������x���ɼ���ܡ����l
����W���沿�֡���늽���Ԫ����Ӌ�����͔����@ʾ���M�ɡ�Ŀǰ�����^������p�l�������x��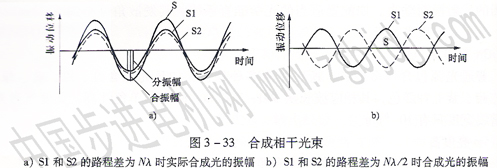
����������
�p�l����y��ԭ���ǽ����ڶ�����Ч�����A֮�ϵġ�������Ч����һ�N����Ҫ�IJ��ӬF����Դ���ٶȦ��h�x�^���ߕr���^���߽��յ��Ĺ�Դ���l�ʏS�c��Դ�oֹ�r���l�ʏS���ڲ�ֵ��f�Q��������l�
���ڹⲨ���f����Փ��Դ�c�^���ߵ������ٶ���Σ��y�õĹ��ٶ���һ�ӵļ��y�õĹ��l���c���L�m������׃�������ߵij˷e�����ٱ��ֲ�׃����Դ���^�����x�_�r�c�^���ߏĹ�Դ�x�_�r����ȫ��ͬ�Ķ������l�ʣ���������Փ�o���Ĺ�Ķ������l�ʞ�
ʽ�У�c����١�
���ö��ʽչ�_����u��c��ֵ��С����ȥ�ߴ�헕r������v����u���Ϳɵó�

�p�l�������x��
�p�l�������x�Ļ���ԭ���c���l�������x��ͬ����һ�N���ͼ������x��D3��34��ʾ���������ù�ĸ���ԭ���Ͷ�����Ч��(��ָ̎������Դ�����\�Ӷ��l�����l��׃���ĬF��)�a���l���ԭ����M��λ�Ùz�y�ġ�
����ܷ����S��ň��ȣ��l���ļ���鷽���෴�������Aƫ���������Aƫ��⣬�������ͬ�����l�ʲ�ͬ���քe��ʾ��f1��f2�����ֹ��RMl��һ���ַ���⽛�zƫ��������Ԫ��DI��������l��f��(f��=f2һf1)����һ����ͨ�^�ֹ��RM1�������_�ֹ��RM2��a̎���l�ʞ�f2�Ĺ�����ȫ���䣬���V����׃�龀ƫ��⣬Ͷ�䵽�̶����RM3���䵽�ֹ��RM2��b̎���l�ʞ�f1�Ĺ�������
���V����׃�龀ƫ��⣬Ͷ�䵽�Ʉ����RM4��Ҳ���䵽�ֹ��RM2��b̎�����߮a����ɹ�������M4�Ƅӣ��t�������l�ʰl��׃�����a��������Ч�������l����������l���f
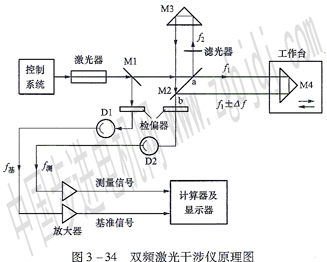
�l�ʞ�f��=f1����f�ķ�����c�l�ʞ�f2�ķ������b̎�R�Ϻ��zƫ��Ͷ����Ԫ��D2���õ��y���l��f�y=f2һ(f����f)�Ĺ�������@·������c�����Ԫ��D1��õ��l���f���Ĺ������ͬ�r���Ŵ����Ŵ��M��Ӌ��C�����p������Ӌ���������������ֵ�����f��������ʽӋ����Ʉ����RM4���Ƅ��ٶ�v���ƄӾ��xL.
ʽ�У�N����Ӌ��Cӛ������}�_�������}�_�����Բ��L�͵õ����yλ�Ƶ��L�ȡ�
�������x����һ�N�߾��ȵ�λ�Ɯy���b�ã�Ŀǰ�ڔ��ؙC������Ҫ�����ŷ���λ���ȡ��؏Ͷ�λ���ȵȵęz�ڰ��]�h�ŷ�ϵ�y�����ݾ��`���a����У���ʣ��Լ������N����λ�Ɯy���b��(��Б�ͬ�������Ŗź��)�Ĝy���`���a����У���ʡ����ڙCе�ӹ��F�������ڃr���F��Ŀǰʹ��߀�^�١�











