�Б�ͬ�����֞�ֱ���ͺ����D�̓ɴ��ֱ�����ɶ��Ӻͻ��߽M�ɣ����ڙz�yֱ��λ�ƣ����D���ɶ��Ӻ��D�ӽM�ɣ����ڙz�y���D�Ƕȡ������H��Bֱ���Б�ͬ�����ĽM�ɺ�ԭ����
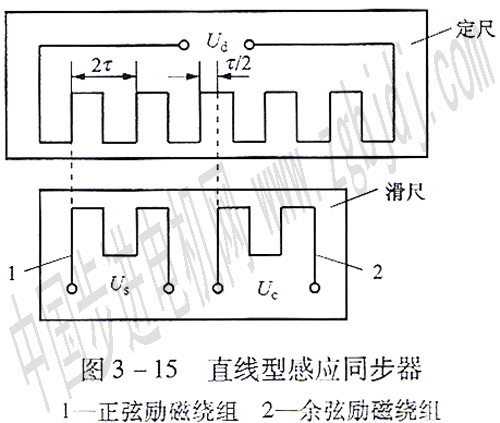
��D3 15��ʾ��ֱ���Б�ͬ�����ɶ��ߺͻ��߽M�ɡ��䶨���dž������Б��@�M���@�M����2 ��ͨ����2mm���������ЃɽM����@�M��һ�M�Q�������@�M����һ�M�������@�M���ɂ��@�M�Ĺ����c������ͬ���ڿ��g����e�_1��4���࣬���ǃɂ�����@�M֮�g���90��늽Ƕȡ����߰��b�ڱ��y���ƄӲ����ϣ������c�����ƽ�У�������һ���ľ��x���s0.2~0.3mm��ͨ�Խ������늉����ڻ����Юa���״�������@�M�܇���a��������Ҏ��׃���Ĵň�����늴ŸБ��ڶ����@�M�Ϯa���Б�늉��������ߺͶ����g�a������λ�ƕr������늴Ŵ���Ϗ��ȵ�׃������ʹ�����ϵĸБ�늉��Sλ�Ƶ�׃����׃����
һ���Б�ͬ�����N����c
l�Б�ͬ�����ķN�
�Б�ͬ�����Мy���L���õ�ֱ��ʽ�͜y�����D�Ƕ��õ����Dʽ�ɷN���������ؽ�Bֱ��ʽ����
(1)�˜�ʽ����ֱ��ʽ�о���****��һ�N��ʹ��****���ڔ���ϵ�y�͔��@�b���д������ã�������̖��GZDһ1��GZHһ1�͡�
(2)խ�Lʽ���䶨�ߵČ��ȱȘ˜�ʽխ�����ھ����^�ͻ�C���ϰ��bλ��խС�Ұ��b���y�Լӹ�����r��
(3)����ʽ�����Ļ��ߺͶ����Ͼ��д֡��С��������@�M�������ϴ����@�M����λ�ƴ�ֱ����Aб��ͬ�Ƕȣ����@�M�͘˜�ʽ��һ�ӡ������ϵĴ֡��С��������@�M�M�ɣ���������늚�ͨ�����֡��С����ĘO��քe��4000��100��2mm��ͨ��ͬ�rʹ�ü��ɽM��һ��****���˜y��ϵ�y���y��������0��002��2000mm�ڴ˜y�������Ȝy��ϵ�yֻ��һ��****���c���ΉK���ߵ��L����200��300mm�ɷN�����e�m���ڴ��͙C������
(4)����ʽ�����Ķ����@�M��ӡ����I.8m�L�IJ��P䓎��ϣ���ɶ˹̶��ڙC��������(һ���Ï��Թ̶�)������Ӌ��ߵ��ο��ǘӿ��ڎ�����ϣ����Ժ������b���p�ٰ��b�棬������ʹ�����S�C�������׃�ζ�׃�Ρ�
(5)�Б��M�����nj��˜�ʽ�Ķ������߷��b��ϻ��ĸБ��M��(���߽��{�����L���ɽM��ʽ����)�����Ҍ����׃������ǰ�÷Ŵ���Ҳ�b�����棬���ڰ��b�cʹ�á�
2�Б�ͬ���������c
(1)���ȸߣ��Б�ͬ�����ĘO�����࣬ƽ��Ч�����aţ�Ĝy������Ҫ�����쾫�ȸߣ���ݔ����̖���ɻ��ߺͶ���֮�g�����ƄӮa�������g�o�Cе�D�Q�h�������Ԝy���Y��ֻ�ܱ������ȵ�Ӱ푡�
(2)�y���L�Ȳ������ƣ����y���L�ȴ���250ram�r�����Բ��ö��K���߽��L�����������g�����ÉKҎ��y�L�x�M���{����ʹ���L���ϵ��۷e�`����چΉK���ߵ����ƫ�
(3)���h�����m�����^�������Б�ͬ�������ٻ���ʹ����T�F�ğ�Ûϵ����������ض�׃���r߀�ܫ@���^�ߵ��؏;��ȣ�������������늴ŸБ��a����̖����������oҪ���^�͡�
ʹ�Õr߀��Ҫע������Ӱ푡�
1 �� ͬ����·�迹�����Q��ͬ�����ȵ�Ӱ�(����׃�������迹��ͬ���������ҡ������迹)��
2)���늉����Q�Ժ�ʧ��Ȍ����ȵ�Ӱ푣�
���b��ϵ�y���ԣ����^���늉��Č��Q��ָ��������ֵ��ȣ���λ���90�㣻���b��ϵ�y���ԣ����зQ����ָUmcos�Ⱥ�Umsin�ȵľ��_�ԣ��{��ϵ�y�rҪ����ע�⣮
�Б��f��������������ʧ���Ҫ����^�ߣ�һ����1�����£�����2�����ϣ��t�Б�ͬ����ݔ��늄ӄ�ʧ����@�ú܇��أ�Ӱ표y�����ȡ�
3)�Б�ͬ�����Б�늄ӄݵͣ��迹�ͣ����Ԍ����ɔ_���}���������ҕ�ӏ����Ρ�
�Б�ͬ�����c���D׃�����Ĺ�����ʽ���ƣ����������Є���@�M��늷�ʽͬ���Б�ͬ�����ɷ֞���λ������ʽ�ͷ�ֵ������ʽ��
������λ������ʽ
�o���������@�M�������@�Mͨ��ͬ�l��ͬ������λ���У�2�Ľ������늉���
�������Ƅ�x���x�r��ua�����@�M�иБ�����늉���kUscos��m,Uc�Б�����늉���KUccos(��m+�У�2)=-KUcsinm���������늉��ڶ����@�M�иБ��ĺϳ�늉���늾��ԯB�ӵó�

ʽ�У�K�鶨���c�����g��늴����ϵ����um����늉���ֵ��2�Ӟ鹝�ࣻx�黬���ƄӾ��x����m���c�Cе���gλ���������ęCе�ǣ����c֮�����ĕr�g늚���ǡ�
�ɴ˿�Ҋ�����ߵĸБ�늉���λ�c���ߵęCеλ�����g�Ї���Č����Pϵ��ֻҪ�ܙz�������@�M�еĸБ�늉�����λ�ƽǣ����܉�y����Ҫ֪���ęCеλ����������ֵ������ʽ
�o���ߵ����������@�M�քeͨ��ͬ��λ��ͬ�l�ʣ�����ֵ��ͬ�Ä��늉�����

���У���ֵUsm��Ucm �քe��

ʽ�У���1����늉��Ľo����λ�ǡ�
�������Ƅӕr�������ϵĸБ�늉���

�����=��1����m����ʽ���Ԍ���

��

�t���Ⱥ�С�r����

�˕r�����ߵĸБ�늉�ud���H����һ�������`��늉���ӛ��ue�������`��늉��ķ�ֵ�c���ߵ�λ��������x�����ȡ��@�ӣ�ͨ�^�y��U�ķ�ֵ��y������Ҳ���ǡ�x�Ĵ�С�ˡ��ڌ��H�����У����ڲ������������̖��1��ʹ��o�o��ۙ��m��׃������ˡ����c��xһ����һ����С����������sin���ȡ֡��ȳ�����Ҳ�����f��ֻ����λ��������x��С�r���Б�늉��ķ�ֵ���c��x���������Pϵ��ͨ�^�y��ue�ķ�ֵ��y��λ�����Ĵ�С��
�� �Б�ͬ�����b��ϵ�y
����λ�z�yϵ�y�У���ʾλ������ָ��������λ��Ƕ�ֵ�o���ģ���ˣ���������������λ�ą�����̖�o�Б�ͬ�����Ļ��߃ɂ��@�M��늣��t�Ķ����@�Mȡ�õĸБ�늉�����λ������ӳ�����ߵ�����λ�á��ѽo����ָ����λ(�����څ�����̖����)�c�Б�ͬ����ݔ����̖��λ�����^����������λһ�r����ʾ�Б�ͬ�������ߵČ��Hλ�úͽo����ָ��λ��һ�£���֮������λ����ڣ��������ߵ�λ�ò�һ�¡�������������λ�����õ��y��ϵ�y��ʹ�Ã���׃��һ�¡�
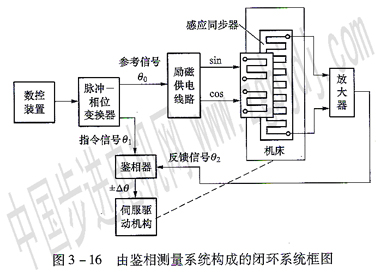
�Б�ͬ������λ�z�yϵ�y�Ļ����h�����������}�_һ��λ׃�Q������Ź�늾�·���`����̖�Ŵ������b�����ȣ���ϵ�y�ĽY����D��D3��16��ʾ��
���]�h݆�����ƵĔ����b���У������D(�D3��16)֪���`����̖�����Կ����ŷ���늄әC���әC���ĝL��z��������λ���`��ķ����\�ӣ�����λ�÷�����ָ����̖���ɔ����b��(���a��)�l���ģ����}�_һ��λ׃�Q��׃����λ��̖�������ڜy��ϵ�y�ϡ�
���溆�εؽ�Bһ���}�_һ��λ׃�Q���ȽY��ԭ����
1_�}�_��λ׃�Q���Ļ���ԭ��
�@��һ�N���}�_��׃�Q����λλ�ƵĔ���ģ�M׃�Q������߉��D��D3һ17��ʾ��
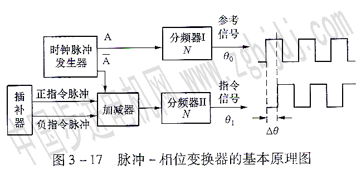
�r��}�_�l�����l�����}�_�зֳɃ�·��һ·������ͨ�����l��I�M��N���l�����������λ�ą�����̖��������һ·�ӵ��Ӝp������ָ���}�_�����|���r��}�_�M�мӜp���ٽ�ָ��ͨ�����l�����N���l��a��ָ����̖���������]���M�o�}�_�������r�£��ɂ����l��ϵ������ͬ���ڽ��յ�N���}�_��ͬ�rݔ��һ�����η��������l�ʺ���λ��ͬ��
�������ʾ�����_�����M�o���}�_�r���Ӝp������������r�}�_����ȥ�����S�͕r��}�_�غ�)���@�ӷ��l��I����ÿ���յ����}�_��ݔ��һ�����β��������l����t��ͬһ�r�g�Ȍ�(N+n)���}�_���l�����ݔ��(1+n��N)�����β�(n���@���r���ȼ��������o�}�_��)�����߱�ǰ������λ�ϳ�ǰ��(n��N)��
��֮�����뷴���M�o�}�_���F�ڷ��l��lݔ��һ�����β����ڷ��l������ݔ��(1һn��N)�����β����@��ʾ���߱�ǰ������λ�����(n��N)��
�ɴ˿�Ҋ�����l����ݔ����ָ����̖���β������ڷ��l��Iݔ���ľ��β�������̖����λ׃���������ƵĔ�ֵ�����ڼӰ˵��M�o�}�_��n������λ�Ƅӵķ���ȡ�Q���M�o�}�_�ķ�̖��
����Б�ͬ�����Ĺ���2r=2ram���}�_����(��)�x����0.01mm�����ஔ��
����λ�ơ������Ҫ��һ������2mm���ֳ�200�ȷ֣����Է��lϵ��N=200��ÿһ��ָ���}�_�a��l.8�����λ�ơ�
2��Ź�늾�·
�}�_һ��λ׃�Q��ݔ���ą�����̖��������λ���ʽo�Б�ͬ�������@�M��š������̖ͨ�����÷�����ͬ����λ���90��ăɂ�����늉���Ҳ�в��÷��������β���ŵġ��D3 18�����Ҳ���늾�·��
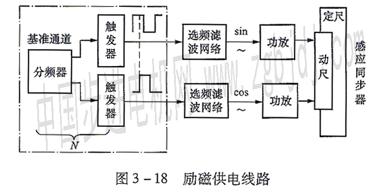
����ͨ�����l����ĩ���|�l��ݔ���ɂ���λ���90��ķ��������x�l�V���W�j׃�����Ҳ����ɹ��ż��o�Б�ͬ�����ӳߵăɂ��@�M��š�
3�b����
�b�����ֽ���λ���^�������������b�eָ����̖�c������̖֮�g����λ�����Єe��λ��Ĵ�С����λ�ij�ǰ�����
�b�����ľ�·�ж�N�������^�����һ�N�Uչ�����������b��������Q�����b�������@�N�b��������Փ���f���b����������ƣ���������Uչ�������������₀����֮�Ȇ�ֵ�b�ࡣ
�b������߉ԭ����D3һ19��ʾ��������D�|�l���M�ɵķ��l��cl��c3����λ���^�|�l��
c2��c4�������c���T�M�ɡ����]��c1��c3 �r���b������180�㡣��c1��c3��һ���|�l���M
�ɣ��b�����2��(��180��)����c1��c3���ɷ��lϵ����n�ķ��l�����ɣ��t�b�����nx(��180��)��
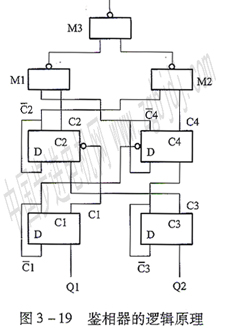
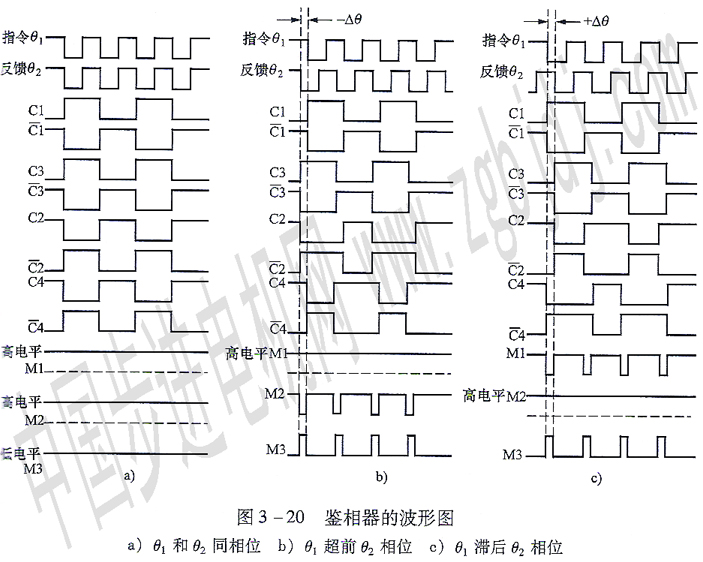
�f���b��������ԭ���ĸ��N���ΈD��D3һ20��ʾ��
��ָ����̖��1���ͷ�����̖��2��λ��ͬ�r���b����ݔ��(��M3ݔ��)��㶨�ĵ��ƽ����D3��20a��ʾ��
��ָ����̖��1����λ��ǰ�ڷ�����̖��2����λ�r���b����ݔ�����ֺ㶨�ĸ��ƽ����M1��M3���}�_ݔ�������}�_���Ȟ����=��lһ��2����D3��20b��ʾ
��ָ����̖��1����λ�����ڷ�����̖��2����λ�r���b����M1ݔ�����ֺ㶨���ƽ����M2��M3���}�_ݔ�������}�_���Ȟ�һ����=��lһ��2��D3һ2��ʾ��
���]�h���ؙC�����ŷ�ϵ�y�У����ÞV���W�j���b����M1��M2ݔ�����}����λ����ȶ�׃�����}�_��̖׃�ɺ͡��ȳ����ȵ�ֱ�����(����̖ؓ)��ȥ���ŷ��C�������������`��ķ����\�ӡ�
�Б�ͬ�������b���y��ϵ�y��
�ڷ�ֵ������B�£����o�Б�ͬ�������������@�M�������@�M�Ą����̖����
�l�ʺ���λ��ͬ����ֵ��ͬ�ăɂ�����늉���ͨ�^�b�e�����@�Mݔ�����`����̖��
��ֵ���M��λ�Ɯy����������b���y��ϵ�y�У�������^�������b��������Q�T��
�·��ϵ�y�Ļ���߉ԭ����D3��21��ʾ��
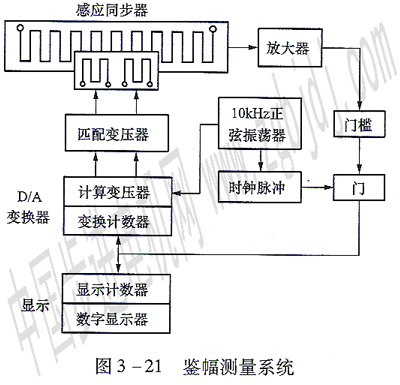
���b���y����ԭ�������ӽo���߃ɂ��@�M�Ą��늉��ķ�ֵ���M�� 
��ʼλ�Õr�Б�늉�e=0�����ɳ������ƄӺ������Ա���ԭ���Ĕ�ֵ�t�`����̖���������^�T��ֵ�r���a��ݔ���}�_���@Щ�}�_���õ�����һ�M�M׃�Q��E(D��A׃�Q��)���Ԅӵظ�׃���늉��ķ�ֵ��ʹ��M�����湫ʽ���Ķ�ʹ�`����̖�������T���ƽ������׃�ӡ� �T���ƽ���������Ǹ����}�_λ��(��λ)�������M�еģ����磬���}�_-λ�Ʈ�����O��01mm���}�_����ô�T��ֵ��������O��0017mm�Ĕ�ֵ�ϣ��༴λ��7��m�a�����`����̖���Ŵ������_���T���ƽ�����⌦2r=2mm�ĸБ�ͬ�����f��һ���T���}�_����������ʹ����һģ�M׃�Q����1��8���sin�ա�cos�ȵĄ��ֵ�����Ӯa��sin�ȡ�cos�ȵĄ��늉���?���ɔ���һģ�M׃�Q���a���ģ�������һ
ģ�M׃�Q���t�ɶ���^��Ӌ��׃�������_�P��·��׃�QӋ�����M�ɣ�Ӌ��׃������ ���^��횾��_�ذ������ҡ����Һ��������
׃�Q���е��_�P���cλϵ�y�п������^����|�c���ڔ����@ʾϵ�y�У��t���\���ڌ��Q�_�P��B�µľ��w�ܘ��ɡ����w�ܵĽ�ͨ�͔��_��ȫ�ɽ��QӋ�����Ĕ��� ���ƣ�����S��Ӌ������B�ĸ�׃���ГQ���w�ܽ����_�P��λ�á�
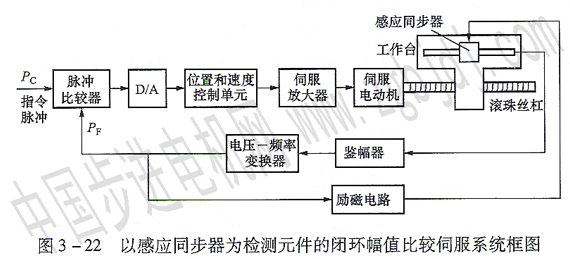
��Щ���ؙC��ʹ���b��������ʽ�ĸБ�ͬ��������λ�Ùz�y�b�ã���늉�һ�l��׃�Q�·�����ߵĸБ�늉�׃�Q�ɱ�ʾλ�Ƶ��}�_��������λ�÷�����̖�����cָ��λ����̖���}�_���^��������^������λ���]�h����ϵ�y����D3��22��ʾ��
|











