�S������ӌW�͔��ּ��g�İlչ����늾��a���V������Ac�ŷ�늄әC���ٶȺ�λ�Ùz�y��
���}�_�c����λ��(�Ƕ�)���Pϵ����늾��a��ͨ���֞�����ʽ��늾��a��****ʽ��늾��a�������������߽Y�Ϟ�һ�w�Ļ��ʽ��늾��a�����
�����a���\�Ӳ������\�ӷ�ʽ���֣��ֿɷ֞����Dʽ��ֱ��ʽ�ɷN������Ac�ŷ�늄әC�����D�\�ӣ����Խ����Cе�B��׃�Q��ֱ���\����ʽ����֮��Ȼ�����ԣ�ֱ��ʽ��늾��a���õ��^�٣�ֻ������Щ�Y����ʽ���\�ӷ�ʽ��������ʹ��ֱ��ʽ��늾��a���Ĉ��ϲű����á����Dʽ��늾��a����������ȫ���]�ͣ����FС�ͻ��������L�Ȳ������ƣ����^�����m���h������������ڌ��H�Ы@���ˏV���đ��á����挢��ҪӑՓ���N��͵����Dʽ��늾��a����
1����ʽ��늾��a��
����ʽ��늾��a�������c��ÿ�a��һ��ݔ���}�_��̖�͌���һ������λ�ƽǣ�������ͨ�^ݔ���}�_�^�e������һ������λ�ƽǣ����o���^�e�����Ă�λ���ϵ����������a���ܮa���c�S��λ��������ֵ����}�_���@�N���a�����������ṩһ�N���B�m�S��λ�����xɢ��������������λ��׃��(���ٶ�)�Ă��з�����������ֱ�әz�y���S��****�Ƕȡ�
����ʽ��늾��a���������Ă��������ֽM�ɣ���Դ���D�P(�ӹ��)���ڹ��(�����)����Ԫ������D3��1��ʾ��
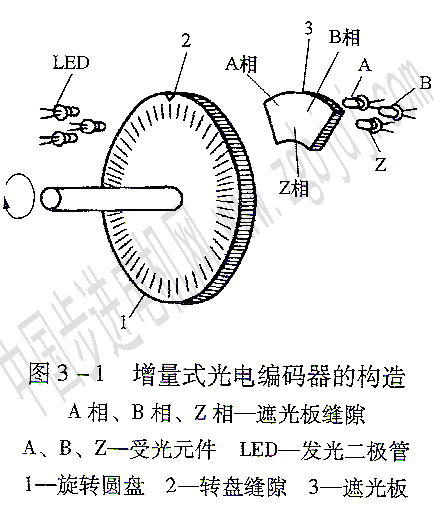
�D�ӈA�P�Ͽ��о������p϶�������ɂ���p϶֮�g����һ���������ڡ��ڹ���Ͽ����c�D�P��������p϶�����Á�ͨ�^�������Դ��λ���ڹ��������Ԫ��֮�g�Ĺ⾀��ͨ�����ڹ���������Ƶă� �l�p϶ʹݔ����̖��늽Ƕ����90�㣬�����^��·ݔ����̖������ͬ�r��������ʽ��늾��a����߀��������������λ�Ę�־�}�_��ָʾ�}�_���A�Pÿ�D��һ�ܣ�ֻ�l��һ����־�}�_����ˣ����D�ӈA�P���ڹ����ͬ�돽�Č���λ���Ͽ���һ����p϶����־�}�_ͨ���c����ͨ�������ض����Pϵ���Á�ָʾ�Cеλ�û��۷e�����㡣
���棬��ʹ������ʽ��늾��a����ԓ����Ďׂ��������}�M���f�����@Щ���}�Ŀ��]��������͂�����Ҳͬ���m�á�
1������ʽ��늾��a���ķֱ���
��늾��a���ķֱ��������Ծ��a���S�D��һ�����a����ݔ����̖�������ڔ���Ҳ�������}�_�����D(P��r)��ʾ�ģ����Դ˶��x�龎�a���ķֱ��ʣ���˹�űP�ϵIJۻڔ�Ŀ�͵��ھ��a���ķֱ��ʡ��Q��֮�����D�ӈA�P����Ͳ�������Ηl���͵��ھ��a��ݔ�����������ڔ����D�P�Ͽ��ƵĿp϶Խ�࣬���a���ķֱ��ʾ�Խ�ߡ����^�ֱ�����ָ�z�y�b���܉�y������Сλ�������ԣ���ȡ�Q�ڙz�yԪ��������Ҳ�c�y����·���P��
�ڹ��I늚�����У�������ͬ�đ��Ì����x��ֱ��ʞ�500��50001~l��r�Ĺ���������a������Ac�ŷ�늄әC����ϵ�y�У����x�÷ֱ��ʞ�2500Pl��r�ľ��a����
2������ʽ��늾��a���ľ���
����ʽ���a���ľ����c��ֱ�����ȫ�o�P���@�ǃɂ���ͬ�ĸ��������һ�N���������x���ķֱ淶���ȣ��_����һ�}�_������һ�}�_λ�õ�������ͨ���������ýǶȡ��Ƿֻ�������ʾ�����a���ľ����c�D�P�p϶�ļӹ��|�����D�P�ęCе���D��r�����쾫���������P��Ҳ�c���b���g���P���@��ʹ���߁��f��ԓ�e����ע�⡣
3������ʽ��늾��a��ݔ���ķ�����
���a��ݔ���ķ�������ָ�ڌ��H�\�Зl���£�����Ҏ�����ȵ�������Ӱ푾��a��ݔ�����ܷ����Ե���Ҫ�����ǜضȌ����������ɵ�Ư�ơ������ھ��a����׃�������Լ���Դ���Ե�׃���������ܵ��ضȺ��Դ׃����Ӱ푣����a��������·���ܱ���Ҏ����ݔ�����ԣ����OӋ��ʹ���ж�Ҫ��ֿ��]���@һ�c��
4����ʽ��늾��a����푑��l��
���a��ݔ����푑��l��ȡ�Q�ڹ���Ԫ�������̎����·��푑��ٶȡ������a���������D�r�������ֱ��ʺܸߣ���ô���a��ݔ������̖�l�ʌ����ܸߡ��������Ԫ������Ӿ�·Ԫ���Ĺ����ٶȲ����c֮���m�������п���ʹݔ�����·��ػ�׃���������a���Gʧ�}�_�ĬF���@�ӣ�ݔ����̖�Ͳ��ܜʴ_��ӳ�S���D��λ�ơ����ԣ���ÿһ�N���a������ֱ��ʴ_���ėl���£�����****�D��Ҳ��һ���ģ�Ҳ�����f����푑��l�������ġ�
5�����a����ݔ����̖��̎��
�ڴ������r�£�ֱ�ӏľ��a�����Ԫ���@ȡ����̖�ƽ�^�ͣ�����Ҳ��Ҏ�y��߀�����m�����ơ���Ϣ̎�����h���x��ݔ��Ҫ�����ԣ��ھ��a����߀��회�����̖�Ŵ��c���Ρ����^̎����ݔ����̖һ���������Ҳ�����β������ھ��β�ݔ����̖�����M�Д���̎���������@�Nݔ����̖�ڶ�λ�����Б���ʮ�֏V����
���ǣ���ݔ����̖��������Ҳ��r��Ҳ���䪚�صă��c��
1)�ڶ�λֹͣ�r���]����ʎ�F��
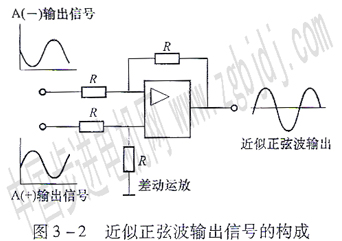
2)��ݔ���Ľ������Ҳ������Ҳ���̖�ֺϳɣ����Եõ�ģ�M�ٶ���̖��
3)�����M����Ӄ�ͱ�����^�͵ijɱ��õ��^�ߵķֱ��ʡ�
��������ԭ�������Ҳ�ݔ����ʽ�ڴ�ӡ�C�ʹűP�Ĵ��^��λ�����еõ��ˣ��V�����á�
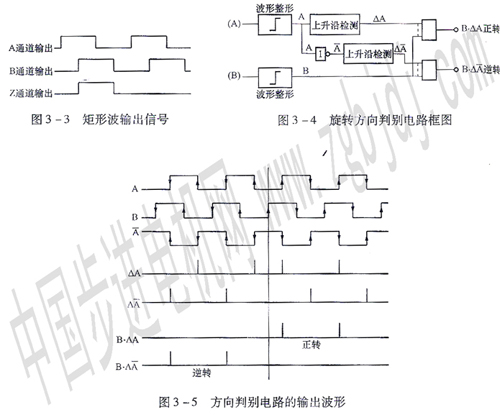
�������Ҳ�ݔ����̖�ĺϳ���D3-2��ʾ�����β�ݔ����̖��D3-3��ʾ
���S�����H�����У�Ҫ��AC�ŷ��
�әC�������ɂ��������܌��F�����\���@��Ҫ�a��ݔ����·������̖����D3һr��ʾ��
�������a����ijһ���D���ɂ���̖���_����ֵ�ر�ʾ�ˏġ�0��������1�͏ġ�1������0�����S׃߉�����ԣ����@�ɂ��S׃߉��̖�cij���o�B߉��̖�M�о��a�������OӋ�����������b�e�·����D3��4��ʾ�������Єe�·��ݔ��������D3��5��ʾ��
�� ****ʽ��늾��a��
�c����ʽ��늾��a����ͬ��****ʽ��늾��a�����ò�ͬ�Ĕ��a���քeָʾÿ����ͬ��С����λ�á�ͨ���������D�a�P���Ƴ�8��12���a�����a�͞�ѭ�h���M�ƴa���R�a)���a�P�;��a���Ę���քe��D3��6�͈D3��7��ʾ��
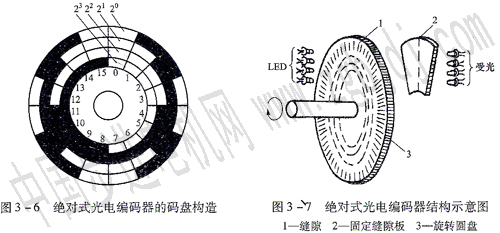
****ʽ��늾��a�������c�̶���ݔ������β�����Ȼ���M�ƴa(���R�a�����D�Q����Ȼ���M�ƴa)��ݔ�����S��λ�õĆ�ֵ��������ݔ���Ķ��M�Ɣ��c�S��λ������һһ�������Pϵ�� ͨ������ͣ늕r�����Gʧ�����\�Еr�mȻͨ늵��o�����x���ęCе�\����r�£�����Ҫ����****ʽ��늾��a��������****ʽ��늾��a���⣬߀�����D׃������****ʽ���Ծ��a��������������߀��****ʽ��늾��a����
�F�е�****ʽ��늾��a��������Dʽ�������ܜy���S�ǵķ�����O�㡫360�㣬�����ж��D�z�y�������y����λ�Ƶķ���ֻ����360���ԃȣ�������m�����D���\�ӿ����Йz�y****λ�õ�Ҫ���y��****ʽ��늾��a������һ��ȱ�c�ǣ��ڰ�λ��****ֵ��̖�M�вɘ�̎��r���������t�r�g�Ĵ��ڣ��ʲ��m�����ٿ��Ƶ���Ҫ�������λ��****ֵ��̖�M�в��Ђ�ݔ���mȻ������߹����ٶȣ����������࣬Ҳ�������ڔ��ؙC�����I�C�����ϑ��á�
��ˣ�Ҫ����Ac�ŷ�늄әC���������F****��λ���ƣ��ͱ�횽�Q�������ᵽ����Щ���}������Ҫ�M��߾����cС�ͻ���Ҫ��
���˿˷����D****ʽ��늾��a�������ڵĆ��}���m�����D���\�ӿ���λ�Ùz�y����Ҫ��Ŀǰ���ѽ��_�l���˶��D****ʽ��늾��a�������ڶ�λ�����еõ��ˑ��á�
�S���a�I�Y����׃�������a�ΑB�я���Ʒ�N���������a�D���Ʒ�NС�������a�����@�N�΄���ʹ���a���B�m�ɿ����M�С��s�̽���r�g������O����_���ʵȶ��ɞ鱣�C���a�����Ч�ʵ���Ҫ���أ�������@��Ҫ�ؔ_�����I�C���˵��ŷ��ӌ�����������λ�ÿزÌ��F****ֵ����
���y�Ĕ��ؙC�����I�C���˵�λ�Ùz�y����������ʽλ�Â��������ԴͶ��r��߀��֪�����،�����****���g�ęCеλ��(����ֵ)������У��λ�ã���회����a���M�лؚwԭ�c���������һ�_�C�����@�N�ؚwԭ�c�IJ�����������韩�����@Щ�C��������ʹ�������a���Еr����ÿ���_ʼ��늻�ͣ늺������͕r�����������@Щ�C�������ؚwԭ�c�������Ǿ�̫�M���ˣ��e�nj����I�C���ˁ��f���F�ڴ�����Ƕ��P���͵ģ���Ҫ���^���s���\�㌍�F����׃�Q�����ǣ�����֪���C���˸��S��****λ�ã���ô���ڙC�����ٲ���֮ǰ���Ͳ���Ҫ���C���˻ؚwԭ�c��Ҳ�Ͳ����M������׃�Q�ˡ�
�����ڹ������fһͣ늣��C���˺����I֮�g�ď��sλ���Pϵ���Д��ˡ��ڻ֏� ��늺��M���քӲ��������y�Ĉ���Ҳ���٣������@�N���������ؙC�����I�C����Ҫ�F****λ�ÿ��Ƶĺ���Խ��Խ�ߡ� ���Fλ�ÿ���****ֵ��������Ҫ��Ԫ������****λ�Ùz�y�������ڔ��ؙC�����I�C���ˁ��f������Ac�ŷ�늄әC�Ƕ��D���\�ӣ����댍�F****λ�ÿ��ƣ��ͱ��Ҫ���c֮���m���Ķ��D****λ�Ùz�y������һ��Ć��D****λ�Ùz�y���ǟo���M��Ac�ŷ�늄әC���D��****λ���\�ӿ���Ҫ��ġ�
�D****ʽ��늾��a�����·�Y����D3��8��ʾ�����H�Ͽ��Կ�������һ�����D****ʽ��늾��a����һ������ʽ���Ծ��a���M�ɡ����І��D****ʽ��늾��������΄�����һ�D֮�Ȍ��F�߷ֱ��ʡ��߾��ȵ�****λ�Ùz�y��������ʽ���Ծ��a�����Á�z�y�D�S�����D�Δ����D�Sÿ���Dһ�ܣ����������a���Ͱl��һ���}�_��������Ӌ�����M��Ӌ�������H�ϣ���������ʽ���Ծ��a�����v�����@����ÿһ���}�_�������D��������360�㡣
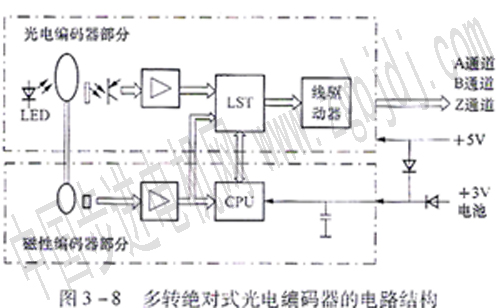
���چ��D****ʽ���a���İl��Ԫ�������^����늳ع�����y�������Դ��늡�����ʽ���Ծ��a����������r��Ҳ���Դ����늡����ڲ����˵�����Ԫ������ͣ늕r��늳ع�늡����Դ���_�r������늳�Ͷ���\�У�ʹӋ����̎�ڱ��֠�B�����������D�S���D�ӴΔ��@һ��Ϣ����늲���Ӱ푆��Dʽ���****���a����һ�D�����ȵ�λ����Ϣ���@�ӣ��Ͳ�������늶�ʹ�D�S��K��λ����Ϣ�Gʧ�����Դ����Ͷ�빤���r������늳��г����������D****ʽ��늾��a���Ϳ��ԏ�ͣ늕r��ԭλ���_ʼ���S���S���D�ӣ��^�m���ⲿ�ṩ���_��λ����Ϣ��
���D****ʽ��늾��a���܉��M���D�S���D�Δ��ęz�y�c��Ϣӛ�����Լ�һ�D�Ȍ�****�Ƕȵęz�y����̖����������̎������̖��ݔ�����к����`���ԡ��c���y�Ć��D****ʽ��늾��a����ȣ��Y���mȻ�Ǐ��s�ˣ������܅s�����������;����V�������Ì��õ��C�ʹ�Ҏģ�����·������̖̎����ʹ�@�N���a�����FС�ͻ���
�����@�N���a������һ�D�Ⱦ��_�z�y****�Ƕȣ��ʌ����N�O����������AC�ŷ�늄әC�������M��ƥ�䣬�Á�y���D�ӵĴŘOλ�á�������ͬ�r���ж��D���y�����ܣ�������늳أ����Էdz��m�������a���й��I�C���˵Ķ�λ���ƣ���lչ��ֱ�����õĸ߷ֱ��ʳ�С�͵Ķ��D****ʽ��늾��a�����ԝM����N****ֵ��λ����ϵ�y����Ҫ��
�� ���ʽ��늾��a��
���^���ʽ��늾��a������������ʽ��늾��a���Ļ��A�ϣ����b��һ�����ڙz�y����Ac�ŷ�늄әC�ŘOλ�õľ��a�����M�ɵ�һ�N��늾��a�������У����ڙz�yAC�ŷ�늄әC�ŘOλ�õ��@�N���a�����H����һ�N****ʽ���a��������ݔ����̖��һ���ľ������c�ŘOλ�þ��Ќ������Pϵ��ͨ�������o����λ���120���������̖�����ڿ���AC�ŷ�늄әC���������������λ���@�N���ʽ��늾��a���ĽY���cݔ����̖������D3��9��ʾ���@�N�z�y�ŘOλ�õķ��������ڟoˢֱ���ŷ�늄әC�С�
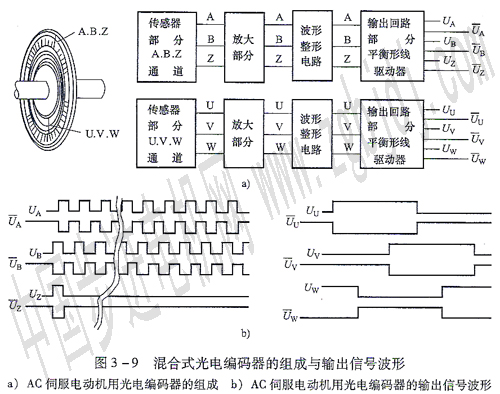
���D�ӈA�P�Ȃ��Ƴɿ��gλ�û���120��������p϶���ܹ�Ԫ�����ܰl��Ԫ��ͨ�^�p϶�Ĺ⾀���a������120���������̖�����^�Ŵ��c���κ�ݔ�����β���̖Uu��Uu��Uv��uv��uw��uw�������@Щ��̖�ļ~�Ϡ�B���քe�����ŘO�ڿ��g�IJ�ͬλ�á��@�ÿ��ݔ����̖Uu��Uu��Uv��uv��uw��uw�����ڞ���g360�㣬��ÿһ�������п��ԽM�ϳ����N��B��ÿ�N��B�����Ŀ��g�Ƕȷ�����60�㣬���������ŘOλ��360����g�ȣ�ÿ60����gλ����һ������ݔ����̖��B��ʾ���@�N�z�y�ŘOλ�õķ����mȻ�������У���ʹ�ŷ�ϵ�y�ĵ�������׃��a�����@�IJ��M�\�� ��
|











