�ڙC�һ�w���aƷ�У�����Ҫ���ЙC�����\���ٶȺ�λ�ü��Կ������w�Y�錦�әC���\�ӵ�Ac�ŷ�늄әC�M���ٶȺ�λ�ÿ��ơ����棬Ac�ŷ�늄әC�Ŀ��Ƽ��g���f�����H�����н������������ɂ��������
1���ŷ�ϵ�yͨ��Ҫ����ȫ�]�h�����c���]�h���ƵĽY����ʽ
λ��ָ���ʾҪ��Ac�ŷ�늄әC�ӵęC���������_����λ��Ŀ��ֵ�Č��Hֵ��λ�Â�������z�y�����λ�Ùz�y����ֱ�әz�y���\�әC����λ��λ����Ϣ������ݔ��˺�λ��ָ���M�б��^�������ֵ�M�зŴ���A늄әC�D�أ�������λ����Ŀ���c�Ƅӣ��@�ӵ��]�h�����ڹ����ϳ��Q��ȫ
�ơ����λ�Ùz�y�����b��Ac�ŷ�늄әC�S�ϣ�ͨ�^�z�y늄әC�S�Ľ�λ�ӵط�ӳ���\�әC���Č��Hλ�ã��@�N��ʽ���ɵ��]�h���ƣ�ͨ���Q����ƣ���D2��8��ʾ��
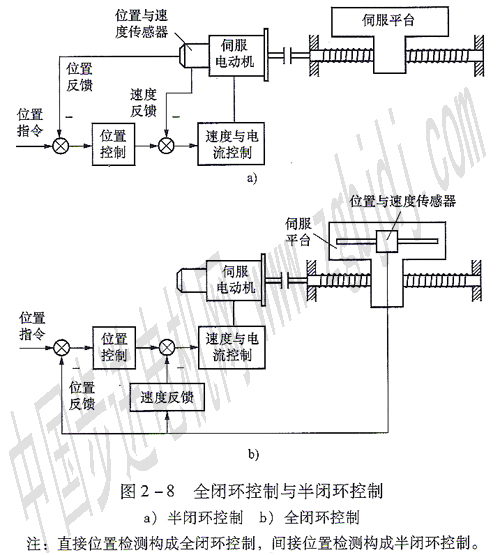
��ԓ���{ָ��������ȫ�]�h����߀�ǰ��]�h���ƣ��������]�h����ϵ�y�e�H����λ�ú��ٶȂ��������b���ŷ��\����ϵ�λ�ò�ͬ���ѡ�
�������ŷ�ϵ�y�Ы@�ø߾��ȵĿ���Ʒ�|��****��ֱ�әz�y�ŷ��C�����ú͌��H�ٶȣ������鷴����Ϣ���뵽ϵ�y��ݔ����cָ��ֵ�M�б��^���ϣ��ڈ��ЙC���b�õ�ǰ���ϰ��bλ�ú��ٶșz�y�������y�ġ����⣬�B��AC�ŷ�늄әC�ęCе�������׃�ٙC�������D�S���Ƿ��B�ӵúܺã�Ħ��������׃�������s���أ�Ҳ����ʹ�ŷ�ϵ�y�ķ�����׃�ġ���ˣ��ڌ��H�У�����Ac�ŷ��
�әC�S�ķ�ؓ�d�Ȱ��bλ�ú��ٶșz�y����ȡ�÷�����Ϣ�����ɰ��]�h���ơ�������Ϣ�z�y�c�����H���ЙC��֮�g��λ���c�ٶȾ������Cе�b�ñ����ľ��ȁ����C�ˡ�
���ŷ�ϵ�y���f���������Ʒ�|��Ҫ����Ҫ�������������棺
1)���ƾ��ȣ�ݔ�����Ƿ������Ŀ��ֵ�����S���`�����?
2)�����ԣ�ݔ�����Ƿ���ٶ��ʴ_��푑���������?푑��ٶȡ���ۙ����������������?
3)�����ԣ��ŷ�ϵ�y�Ƿ�?�����ǿ���ϵ�y����������ǰ�ᡣ
����ʹ��M���^��Ԕ����ӑՓ��
2�����ƾ���
���ƾ����w�F���ŷ�ϵ�y��ݔ����̖��ݔ�����Ŀ����������@���ԏ��o�B�̈́ӑB�ɂ���������о������^���o�B���ƾ�����ָݔ������ۙ����ָ����^���^�̽Y�����M�뷀�B����ݔ�����Ϳ���ָ���g�����ڵĺ㶨ƫ����@��ƫ��Ĵ�С������ϵ�y�M�뷀�B��Ŀ�����������D2��9��ʾ��
�ڈD2һ10����ʾ���]�hƫ����ƿ�D�У������o�B���ƾ��ȸ��c�͵Ŀ����`��e������ʽ���

ʽ�У�xr��׃��X��ָ����̖��x0��׃��x��ݔ����̖��
ݔ����̖��
ʽ��K��Ŵ������档
��ˣ������`���
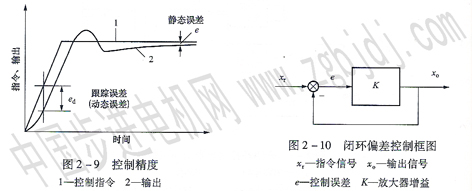
��ʽ(2��38)��֪���S������K�������`��e�����pС�����Ŵ����������o��r�������`��e=0������ʹ�����`���0��ͨ�����ڿ��ƻ�·���O�÷e�ֿ������ء��mȻ���÷Ŵ�����������Խ�Q�����`��}�������ڙCе���ֵ���ϴ����g϶��Ħ���������ڰ��]�h���ƽY���r���]�а������]�h֮�ȣ���Ҳ���a��ݔ���`����ԣ����]�h��ęCе�����������ஔ�ߵľ��ȣ����ܱ��C��K�˵�ݔ���`������������S�ķ����ȡ�
��һ���棬���o������ָ��r�����ڱ���ϵ�y����늴őT�Ժ͙Cе�T�ԣ��Լ�Ħ���������g϶�����ش��ڣ�����ݔ����̖Ҫ�����ݔ��ָ����̖��ݔ����̖���ܼ��rۙ����ȫ����ݔ����̖������������^�ĄӑB���ƾ���(��ۙ�`��)���}�ڄӑB��ۙ�^���У�ݔ����̖ƫ�xݔ����̖�ij̶Ⱦ��ÄӑB���ƾ��ȁ��������������Ǻ㶨���������ӳ��ڿ���ƫ���^���_��ָ���߀���ܮa���^��ij��{���ڌ��H�\���У�Ҫ������@�N�ӑB�`�Ҫ̫��
3��푑�����
ϵ�y��ݔ���λ�A�S��̖�r��ݔ������푑��^����D2��11��ʾ���ӑB푑��Sϵ�y��������r��ͬ��׃��������l��ʾϵ�y��푑��^�죬����2��ʾϵ�y��푑��^����һ����f����ϵ�y��푑��ܿ�r��ϵ�y�ķ����Ԍ�׃�ģ��������ܮa����ʎ.���OӋAc�ŷ�ϵ�y�r����ԓ�eע�⡣

4.������
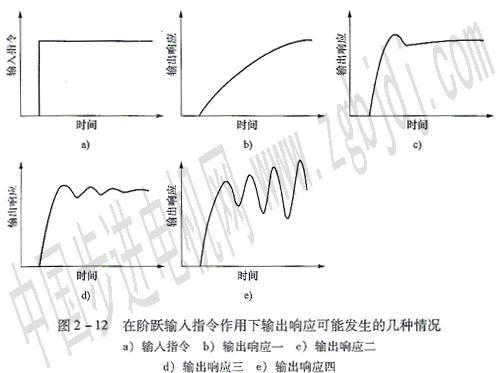
ϵ�y������һ��ϵ�y����������ǰ�ᡣ��һ���]�h����ϵ�yʩ���A�Sָ��r��ϵ�y�a����ݔ��푑���������D2��12��ʾ�ĎN��rݔ��푑��Ġ�B�ɿ���ϵ�y�ĽY���ͅ������Q����������ߡ��������t��r��ϵ�y��ݔ��푑������װl����ʎ������ĵ���r�£���ʎ���lչ���lɢ��B����D2һ12e��һ��Ҫ��ݔ��푑���D2һ12c�����ǘӣ����^�̕���С������ʎ�ܿ��˥�p�������ʴ_�ظ�ۙĿ��ֵ�M�뷀�B�\�С�
����ӑՓ��Ac�ŷ�늄әC�ٶȿ���ϵ�y���A�Sݔ��ָ���������ϵ�y��ݔ���������A�Sݔ��ָ����̖���зdz�����l�ʷ�����ݔ��������ܺ�푑��ġ��F�ڣ���AC�ŷ�늄әC�ٶȿ���ϵ�y�����һ�l�ʵ����Ҳ�����ָ��r������ݔ��������ۙݔ��ָ���ԭ������ݔ��푑�Ҳͬ�ӑ�ԓ�����Ҳ�����D2��13��ʾ��
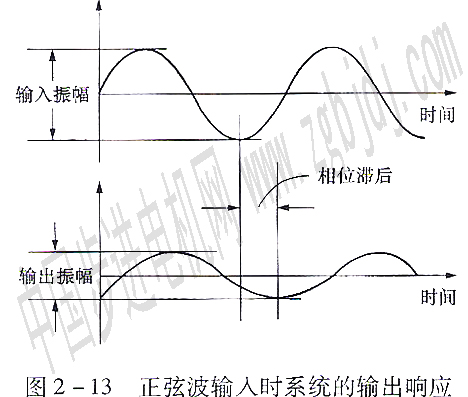
�ɈD��Ҋ������ϵ�y��ݔ�����Ҳ����f��ݔ��푑������Ҳ��ڷ�ֵ����λ���涼�l����׃���������ߵ��l����ȡ�ݔ��푑���ݔ��ָ����@�N�Pϵ�������l�����ԁ�������������ϵ�y�ą����Q���ġ���ijЩ�����У���������ŷ�ϵ�y�Ŀ�����****�܌��Fݔ����ݔ��֮�g������λ��ۙ�����Ҳ�ϣ����ֵ�ܵ�˥�p���@��Ҫ��������Ŀ��Ʒ������ܽ��ƌ��F��
|











