Ac�ŷ�늄әC���ڿ˷���Dc�ŷ�늄әC�����ˢ�͙Cе�Q�����������ĸ��N���ƣ�����ڹ��S�Ԅӻ�(FA)�Ы@�ÏV���đ��á��ڮ����\��Ac�ŷ�늄әC��ͬ����Ac�ŷ�늄әC�@�ɷN����У�Ŀǰ���ڔ��ؙC�������I�C���˵�С���ʑ��È��ϣ��D�Ӳ������Ų��ϵ�ͬ���ŷ�늄әC�ӫ@���˱�ǰ�߸���V���đ��á��@��Ҫ�����F�����Ų��ϵ����ܲ�����ߣ��r���½����������������
�әC���fҲ���^���Σ������F�����ܵă�������֮�ʡ���ˣ���������ҪӑՓ�@�N��͵�Ac�ŷ�ϵ�y��
����ͬ��늄әCAc�ŷ�ϵ�y��Ҫ�����ׂ����ֽM�ɣ�
1������ͬ���ŷ�늄әC
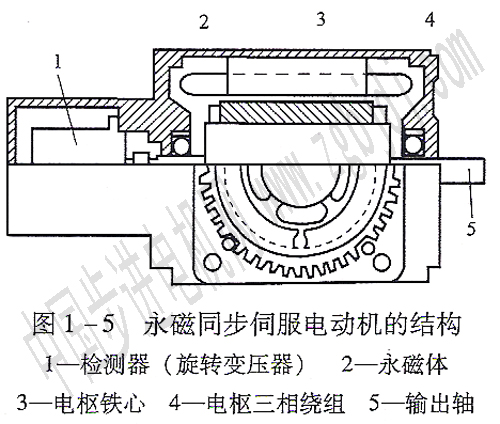
����ͬ���ŷ�늄әC��Ҫ���D�ӺͶ��ӃɴֽM�ɣ���Dlһ5��ʾ�����D�����b�������Π�������w�����Ԯa���㶨�ň����D���ϵ����Ų��Ͽ��Բ����F���w��ϡ�����Ų��ϡ������ܶ��r���m�˵����Ų��ϣ������늄әC���ŷ����ܺ͌��û��ṩ�˗l���������D���ϛ]�Є���@�M���������w�a���ň����������Ҫ�����������늄әC�Ȳ��İl��ֻȡ�Q��늘��������늄әC�Ķ����F�����@������늘��@�M�����ڿɿ��Ƶ�׃�l�Դ�ϡ��ڽY���ϣ������F��ֱ����¶�������g�����ɢ����r���ã�Ҳʹ늄әC���ڌ��FС�ͻ����p������
2���ٶȺ�λ�Â�����
��z�y늄әC�Č��H�\���ٶȣ�ͨ����늄әC�S�ķ�ؓ�d�˰��b�ٶȂ���������y�ٰl늙C�������M��λ�ÿ���ͬ�rҲ�b��λ�Â����������늾��a������������ͬ���ŷ�늄әC���f��߀����b���D�������w�ĴŘOλ�Ùz�y�����z�y���ŘOλ�ã����Դ˞�����ʹ늘�������F�������ơ����H�ϣ��z�y늄әC���D�����D�ٶȡ��ŘOλ�ú�ϵ�y�Ķ�λ�����@���N���ܿ���һ����늾��a�������D׃��������ɣ�����һ���z�y����Ҫ��ɃɷN���ܡ���N������һ���������팍�F�����ԜpС��
늄әC���S��ߴ磬���ܺ������ƺͰ��b��
3������׃����PwM�����·
������׃����Ҫ������������׃���ɲ��ֽM�ɡ���������ݔ������ཻ���������ֱ��늣����^������V��ƽ�����ṩ�o��׃����������ֱ��ݔ��늉�����׃������������PwM(�}�_�����{��)������̖�����£���ݔ���ֱ���׃��늉��c�l�ʿ��{�Ľ���늣�ݔ�뵽�ŷ�늄әC��늘��@�M�С�PwM��·��һ�����l�ʮa�����|�l���������Ŀ�����̖��ʹ������׃����ݔ���l�ʺ�늉����օf�{�Pϵ����ʹ����늘��@�M�еĽ�������������õ������ԡ�
4���ٶȿ����������������
һ����r�£��ٶȿ�������PI(����һ�e��)����Ҏ�ɣ�����ݔ�������ָ��(ֱ����)���ٶȿ�������������Ҫ�Ǟ������M�з������ٶȿ��ƣ���ʹ���ڶ�λ�r���a����ʎ����Ȼ�����ŷ�ϵ�y�У������M��λ�ÿ��ƣ�Ҫ���ٶȭh���п���푑��ٶ�ָ��������������ڷ��B�r�������õ�����Ӳ�ȣ������N�_�Ӿ������õ��������á�
��������������ٶȭh�ăȭh��������ھC�����ָ����̖�ͷ�����̖��ʹ늘��@�M�е�����ڷ�ֵ����λ�϶��õ���Ч���ƣ�����c��ͨʸ�������������Ÿ��ٿ��ƣ����������ͨ��Ҳ����PI����Ҏ�ɣ�Ҫ�������и��ߵĿ����ԣ����m�������˲�rֵ��ۙ���Ƶ�Ҫ��
�D1��6��ʾ��Ac�ŷ�ϵ�y����ԭ�����º�������
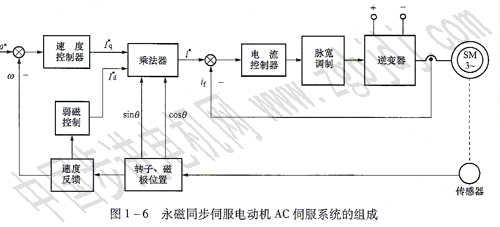
�ٶ�ָ����ٶȷ�����̖���ٶȿ�������ݔ����M�б��^���ٶȿ�������ݔ����̖�����ָ����̖���@��һ�����������ֵ��ֱ��������늄әC�ǽ���늄әC��Ҫ�����䶨���@�M��ͨ�뽻���������ˣ���회��ٶȿ�����ݔ����ֱ�����ָ�������ʹԓ�������ָ�����λ���D�ӴŘOλ�ÛQ�������ָ����l�����D�ӴŘO�����D�ٶȁ�Q�������Ұ����ָ��ʸ���������c�ŘO���a���Ĵ�ͨ�������Ŀ��gλ���ϣ��@�ӾͿ����_���cDc�ŷ�늄әC���Ƶ��D�ؿ��ơ���ˣ���λ�Ùz�y
��ݔ���ĴŘOλ����̖���ڳ˷������cֱ�����ָ��ֵ��ˣ��Ķ��ڳ˷�����ݔ���˾ͫ@���˽������ָ��������ָ��ֵ�c���������̖����^��ֵ�������������������������ƻ�·�ĸ��ٸ�ۙ������ʹ��늄әC����늘��@�M�Юa���������c�������ָ�����Ƶ���ֵҪ�ߵö�����������ԓ����c�����w����îa��늴��D�أ��Ƅ�Ac�ŷ�늄әC�\�ӡ�
Ac�ŷ�늄әC�a��늴��D�ص�ԭ���cDc�ŷ�늄әC��ͬ�����ڴň��е��d�����w���ܵ����������������ķ����c���w��ֱ��Ac�ŷ�늄әC�еČ��w���ǹ̶��ڶ����F���ϵ�늘о�Ȧ��������늘о�Ȧ�ϵ����Է��������ķ�ʽ���D�������w���Ķ�ʹ�D�����D�������@�r���������w�D�����D��ͬ�r�������ڶ��Ӿ�Ȧ�����^�c�D�ӴŘOλ�ñ���һ�������Pϵ����������������D�Ӿ͕��B�m�ܵ����D�������ö��^�m�\�ӡ�
|











