���I�C������һ���漰��N���g�ĵ��͙C�һ�w���aƷ�����V��������܇���졢�Cе�ӹ�����ӡ���Դ��������܊��������ȹ��I���T����Ҫ�����ᡢ���ӡ��b�䡢���\��һЩ����h���µģ�=[�����ɞ����a������Ҫ�M�ɲ��֣���������ҕ��
���I�C���˿���ϵ�y�Ę�����D1��2��ʾ��
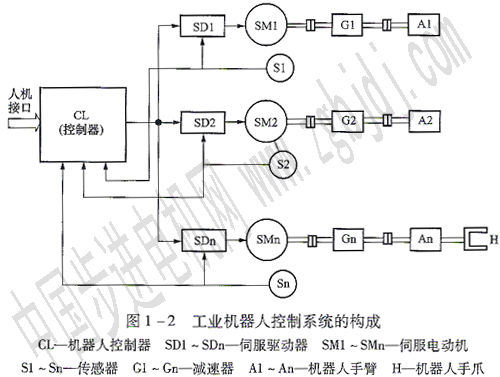
�C���˿�����cL�ஔ���˵Ĵ��X���ǹ��I�C���˵���Ҫ�M�ɲ��֣���֧�������I�C���˰�Ҏ���ij����\�ӣ���ӛ���˂��o�蹤�I�C���˵�ָ����Ϣ(���������\��܉�E���\���ٶȼ��r�g��)��ͬ�r�������ϵ�y����Ϣ���ŷ���ϵ�y�l��������������ܿ��پ��_�ؿ��ƙC�������ŷ����S�Ą�����λ�ã�Ҫ��������ܸ��ٵ��M�Џ��s������׃�Q�\�㡣�������ĺ��IJ�����̎����������Ƴ����������ʹ�õĹ��I�C���ˌ����Z�ԡ�
�ŷ�����sD�Á����ŷ�늄әC�����I�C���˿������l����(����צ)���ٶ�ָ����̖�c�y�����Č��H�ٶ���̖����^�����^��IJ�ֵ�ӵ��ŷ��Ŵ�����ݔ��ˣ����^׃�����Ĺ��ʷŴ�׃�Q�c�{�غ����ŷ�늄әC�D�غ����D�ٶȣ�������ƽ�������ٵ��Ƅӵ��A��λ�á�
�ŷ�늄әCsM���鹤�I�C�����ֱۺ������ȵ��ӈ���Ԫ����Ҫ�����w�eС���|���p�����ܮa�����D�ء�Ŀǰ�ڹ��I��ʹ�õĴ�����C���ˣ���ģ�M���w�ֱۄ�����һ�N�b�ã�Ҫ���ŷ�늄әC���b�ڸ��۵��S�ϣ��Ӹ��ۿ���ƽ���Ƅӡ����˜p�p�ֱ۵Ŀ��w�|����ϣ�����ø�����ϡ�������ŷ�늄әC��Ŀǰ���ڹ��I�C
�����ŷ��Ӽ��g�У���õ���Dc�ŷ�늄әC(ֱ���ŷ�늄әC)��Ac�ŷ�늄әC(�����ŷ�늄әC)�ɷN����Ac�ŷ�늄әC�đ���Խ��Խ�V�����K��ȡ��DC�ŷ�늄әC��
�@�����f�Ă�����s����ָ���b���ŷ�늄әC�S��ؓ�d�ȵ��ٶ��cλ�Ùz�yԪ����������z�y�ŷ�늄әC���D�ټ��D�ǣ��Ķ��M�и��S���ٶ��cλ�ÿ��ơ����õĂ������й�늾��a�������D׃�����ȡ��@Щ����������Ӽ��g��Y�ϣ���ʹ���ŷ�늄әC�Ŀ��Ƽ��g�õ���Ѹ�ٵİlչ�����F�߾��ȵ��ٶ��cλ�ÿ��Ƴɞ���ܡ�
���I�C���˵��ֹ�H���Á�ץȡ����ġ�
���I�C������һ�N���͵ęC�һ�w���aƷ�����Ӳ�����õ���늚��ŷ�ϵ�y���@�N늚��ŷ�ϵ�y���Ҍ��ظ�ۙ��������õ������Ŀ���Ʒ�|��
�������f�����I�C���ˌ��ŷ���ϵ�y��Ҫ�����£�
1)�ŷ���ϵ�y����������ݔ�����غ��ʣ��ԝM����N�l���µĹ���Ҫ��
2)�܉��M���l�������Ƅӣ��������D�ГQ���؏��\�С�
3)�܉��`���ؽ��ܿ������Ŀ���ָ����F�D�ء��ٶȼ�λ�ÿ��ơ�
4)�ŷ�ϵ�y���������õķ����ԣ����܌����������M�п���푑���
5)�\�Ӳ����đT��Ҫ�M����СЩ��
6)�����w��Ҫ���b�õ��w�eС���|���p��
7)���ھS�o��
�Ĺ��I�C�����Ӽ��g�İlչ�vʷ�Ͳ�ͬ�đ��È��ρ�������Դ��늚�ʽ���≺ʽ���͉�ʽ���������늚�ʽ�ŷ������@��������Դ���Ƀ��o��Ⱦ�������{�غ�׃�Q�������e�õĿ����`���ԡ��S����ڼ��g�������Ӽ��g���طN늄әC���ϼ��g���M����ʹ늚�ʽ�ŷ��ӷ�ʽ�õ���Խ��Խ�V���đ��á���늚��ŷ��ӷ�ʽ�У����õ��в��M늄әC�ӡ�ֱ���ŷ�늄әC�ӡ������ŷ�늄әC�Ӻ�ֱ��늄әC�ӵȡ�Ŀǰ�������ŷ�늄әC�Ӽ��g�ѽ����죬���ЮaƷ���ۡ�
|











