�ŷ�늄әC�đ���
�ŷ�늄әC�V�������ڸ��ֱ��������늚��ŷ�ϵ�y�������л���Ԫ�����@Щ�ŷ�ϵ�yһ���Ա����ƌ����λ�á�λ�ơ��\���ٶȡ��������صșCе�������Ŀ�ˣ�Ҫ���ƌ����܉�Q�١��ʴ_�ظ�ۙϵ�yݔ���o������Ŀ�˵�׃�����@Щ�ŷ�ϵ�yͨ��Ҋ�ڙCе�O�������c�ӹ��ИI���Ԅӻ��x���x���ИI�����I�^�̿��Ƽ������I���]��늚��ŷ�ϵ�y����ϵ�y���\�з��������ƾ��ȡ��`���ȡ�����푑������_���ܵȷ����Ҫ�F��늚��ŷ�ϵ�y����ʹ���m�����ƌ���Ϳ���Ŀ�˵ĸ��N������������Ԫ�����ṩƫ����^�����������F�]�h���ơ����ڸ߿���Ҫ���ϵ�y��߀�������Ӌ��C����߿������ܣ�
늚��ŷ�ϵ�y����鳣Ҋ����λ���ŷ�ϵ�y��λ���ŷ�ϵ�yͨ�������Cе���в��ֺ�늚���Ʋ��֡��ԙC�����������ŷ�ϵ�y�Ŀ��ƌ���һ���ǹ����_��(����)��ͨ�^�����ęCе���әC�����X݆���z�ܡ���܉��ֱ���ӣ�˦����Ʋ�����Ҫ����������������Ԫ�����ŷ����·���ŷ�늄әC������Ԫ��(�����ŷ�˦�әC)�䮔�ˏ�늚���Ƶ��Cе����λ�û�λ��ݔ�������g�h��һλ���ŷ�ϵ�y���ð��]�h���]�h���ƵĿ�D����D6 -6��ʾ��
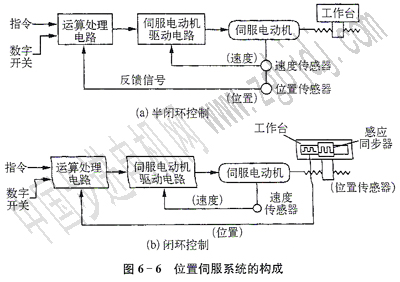
�ڰ��_�hλ���ŷ�ϵ�y�У�ֱ�ӵĿ��ƌ������ŷ�늄әC��ͨ�^�����ɿ������ٶȺ�λ�á������_��λ�û�λ���ܵ����әC������g϶�����ӷ�ͬ�����ص����ƶ��o���c�ŷ�늄әC�Ą�����ȫ���������_�hλ���ŷ�ϵ�y���ƾ����Բ�����������^�ã�Ŀǰ�ڙCе�O�������ڏV��ʹ�á��]�h���ƕr�ķ�����̖�����ڙz�y�����_λ�Ùz�y������(�����ł��������Ŗł������c�Б�ͬ������)�������_�Ķ�λ���ȱ��^�ߣ���λ�Â������r���^���F����ʹ�õļ��g�l���c�h���l��(���紲�����ӹ��^
���е���ӡ��h���ض��c��ȡ��՚��еĻ҉m������)Ҫ���^�ߣ��S�o�����^���y��
����늄әCҲ�������Ԅӻ��y���cӛ䛃x���x���У����繤�Iӛ䛃x��ӛ䛹P�������ŷ�늄әC�ӣ���ϵ�y�Y��Ҋ�D6��7��
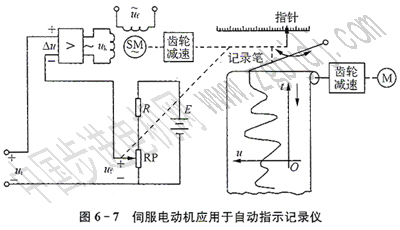
�Ԅ�ָʾӛ䛃x���L���ԄӱOҕ��ӛ䛼�ָʾ�����ƹ��I�O��Ġ�B��׃����ӛ䛼�����ͬ��늄әC���X݆�p�ٙC���τӣ��Կ��O�����ٶ�(�ஔ�ڸ�׃�r�g�S�Ć�λ)����ӛ䛼����������ŷ�늄әC�Sݔ�����X݆�p�ٺ���ӛ䛹P��ָᘼ��λ�������^������ɘ˜��Դ��߾��ȷ����Դ���������R���λ��RP����ķ։��·ݔ���ķ���늉�(��ӳ��ӛ䛵�λ��)�c��ӛ䛵�ݔ��늉�u��һ���IJ�ֵ(�f��ӛ䛹P��δ��ȫ��ݔ��늉�Ҫ���_��������λ��)����ôƫ�������ŷ��Ŵ����Ŵ����·̎����ʹ�����ŷ�늄әC���D��ֱ��ӛ䛹P��λ����ȫ�_��ݔ��늉���Ҫ���λ�Þ�ֹ���ŷ�늄әC�V������܊���I���������ژ�����ڻ����_�쾀��λ���S��ϵ�y���ƌ����ˑB����ϵ�y ��
|











