һ������늄әC�c늴�ʽ늄әC�ı��^
(1)���A��Փ������늄әC�ǻ��ڄ��w�IJ�����Փ�����É�늾��w���扺�Ч�����F��ܵ��Cе�ܵ��D�Q�����ڳ���늄әC�Ķ����D��֮�g�]�К�϶����������ȫ��ͨ�^���w��׃�κͽ��|����f�ģ���˳���늄әC�Ļ��A��Փ�ǙCе������Փ��늴�ʽ늄әC�ǻ��ڂ��y��늴ŸБ���Փ����������ͨ�^�����D��֮�g�Ě�?***���~ģ����紒�����������Ŵų��е�ͨ��i�r��^�������ģ���Ҿ���ʽ��E����Ļ�����Z�ʉq�ų���Zۡ?BR> (2)�\�����ԡ�����늄әC��ͻ�����c�����܌��F���D�١����D�ص�ؓ�d�\�У�����ȱ�cҲ���^���@����Ҫ�dz���늄әC�������CеĦ������f���������H늄әC��Ч���^�ͣ�����ʹ�É���Ҳ�^�̡����yӋ������늄әC��ƽ��������s��2��OС�r���c늴�ʽ늄әC��ȣ��L�r�g����������߀�^Ƿȱ��
(3)�������ԡ�����Փ�ρ��f��Ŀǰ����늄әC߀�]��һ���ܜʴ_�����䶨������^�̺��D���\���^�̵Ĕ��Wģ�͡����ډ�늲��ϵķǾ��ԡ�Ħ���l�ᡢĦ�����Ӻͭh���ضȵ�Ӱ푣����D�ӵ�Ħ�������a�����صķǾ���׃�����@�N׃��ʹ�þ��_����늙C�D�ٵ��y�ȴ�����ӡ����⣬���ډ�늲������ԵIJ�ͬ��ÿ�_����늄әC�����Դ������ͬ���@��늙C���Դ���һһ���ף���˲����ڴ�Ҏģ���a��
��������늄әC���Ì���
�M�ܳ���늄әC��һЩ����߀���M���⣬��˜�߀�]�нyһ��������������ɫ�r�������cͻ�������^��ʮ������о����_�l���ѽ��ں��պ��졢�C���ˡ����܃x�����t���O���Ӱ���O���T���I��õ�����Ҫ�đ��á������B�ׂ����Ì�����
1�����ڙC�����P����
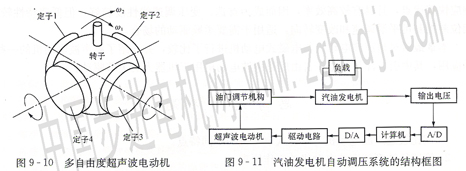
���ڳ���늄әC�ǰщ�늾��w���l�����͙Cе���ͨ�^�Cе׃�Q�D�Q�ɻ��D�\�ӻ�ֱ���\�ӣ���늾��w�O���Ķ����Ժ͙Cе׃�Q�Ķ����ԛQ���˳���늄әC�ĽY���S����ʣ��书��Ҳʮ�֏V�������磬�Ժ�ȷ���O���ĉ�늾��w���ڲ�ͬ�ęCе׃�Q���Ԙ��ɭh���в��ͳ���늄әC��Ш���v���ͳ���늄әC��ֱ��ʽ����늄әC������Ť��늾��w�������ɏͺ�ʽ����늄әC�����Ï���O���ĉ�늾��wҲ�����������Dʽ��ֱ��ʽ����늄әC���ձ�****���Ƴɹ������γ���늄әC�������Ă����Ӻ�һ�������D�Ә��ɣ������ڃɂ����ɶȵķ������D���D9 10��ʾ��늙C�аl�ˆT�����ѾõĶ����ɶ�늄әC�������г���늄әC��һ�Ѓ��c����������̫��̽�y�C���˵��P���ӡ�
2���������Ͱl늙C�����T�{��
��yʽ���Ͱl늙C����ͬ���l늙C������]���Ԅ��{���b�ã��ڹ������^���Е����F���ؓ�d���ӌ���ݔ��늉��½��ĬF��ͨ���Ľ�Q�k�����քӼӴ����T��������͙C��ݔ�����ʣ��@Ȼ�@�Ǻܲ�����ͺܲ����_�ġ����ˌ��F�l늙C�Ԅ��{����Ŀ�ġ���Ҫ�ڹ����^�������뷴���h�������x���{�����T�Ĉ��ЙC����ֱ��ʽ����늄әC����푑��ٶȿ졢��λ���ȸߵȃ��c�����{�����T���ЙC���������x��
�D9 1]��ʾ�����Ͱl늙C�Ԅ��{������ϵ�y�ĽY����D��ԓϵ�y��ֱ��ʽ����늄әC�����Ͱl늙C����Ӌ��C��A��D��D��A�D�Q���M�ɡ�Ӌ��Cͨ�^A��D�D�Q�ӿ���һ�����l�ʌ��l늙C��ݔ��늉��M�вɘӣ���̎����l������ָ���ͨ�^D��A�D�Q�ӿ��ӳ���늄әCֱ���{�����T����׃�l늙C���D�٣��Ķ�ʹݔ��늉�������ָ���ķ���֮�ȡ�
3�����������C���Ԅ��{��
�h���в��ͳ���늄әC�a��������λ���ڈA�h�ϣ�ͨ�^�����OӋ�����D�ӣ����ѳ���늄әC�����пսY�������пղ����и��N���ã�����;������������C���Ԅ��{���C������D9 12��ʾ������ǰ�������C�У�늴�ʽ늄әC�����b�������C������w�У�ͨ�^�p�ٵ�һϵ�Ђ��әC���Ō����������R�^�����ڂ���ϵ�y�g϶�͙Cе�T�Ե�Ӱ푣�푑��r�gͨ�����^100��s�����F�ڌ�����늄әCֱ�Ӱ��b���R�^�����ܲ������R�^ֱ���ӣ��o�����g���f�����푑�Ѹ�٣�һ���ڔ���֮�ȼ������������������OС��
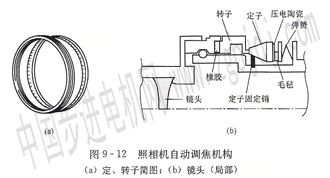
����늄әC��һ�N��ԭ�����½Y���Ŀ���늙C�������É�늾��w���扺�Ч�����F��ܵ��Cе�ܵ��D�Q������A��Փ��ȫ��ͬ�ڂ��y��늴�ʽ늄әC��������Ҫ��B�˭h���в��ͳ���늄әC�Ļ����Y��������ԭ�����ӿ��ơ�
�h���в��ͳ���늄әC�����c�������c��늾��w�o�����B�ĭh�Ώ����w�ȼ��l�����\�ӵ��в��������в������|�c�ęE�A�\�Ӂ펧���D���D�ӡ��@���в����Ƀ�·��ֵ��ȡ��l����ͬ���r�g�Ϳ��g�����У�2�ă����v���B�Ӷ��ɵģ������Ҫ�ڭh�Ή�늾��w�ĘO��������ͬ�rʩ�Ӄ����r�g�Ϳ��g�����У�2�Ľ�������늉����@�N�����C���c�������Q�����@�M�a���A�����D�ň��Ƿdz����Ƶġ�
����늄әC������Ќ��õ����Դ���������һ�N�C�һ�w���aƷ�����{�ٿ��ƿ�ͨ�^׃����׃�l��׃��λ��팍�F��׃�l���ƿ��Գ�����ó���늄әC���ٴ��D�ء��ӑB푑�������c���Ҿ����^��Ч�ʣ�����ɞ�****��׃���{�پ��Զ��^�ã������������^���λ����ƿ�ƽ���{�ٺ�׃�D�� ���m������Ҫ����ӵĈ��ϡ�
|











