һ���扺�Ч��(y��ng)����
���Ч��(y��ng)����1880���ɷ����ľ����ֵ����Ȱl(f��)�F(xi��n)�ġ�һ����늈������£���������늽��|(zh��)�Ў�����ӵ������\�Ӷ��l(f��)���O��������ijЩ늽��|(zh��)���wҲ�����ڼ��Cе��(y��ng)�������°l(f��)���O��������(d��o)�½��|(zh��)�ɶ˱����(n��i)���F(xi��n)�O���෴�����`늺ɣ���늺��ܶ��c���������ȡ��@�N���ڙCе��(y��ng)�������ö�ʹ���w�l(f��)���O���ĬF(xi��n)�Q�������Ч��(y��ng)����֮����һ�K���w������늈��У���늈��������£����w��(n��i)����ؓ늺ɵ����ĕ��l(f��)��λ�ƣ��@һ�O��λ���֕���(d��o)�¾��w�l(f��)����׃���@�N������늈������ö�ʹ���w�l(f��)����׃�ĬF(xi��n)�Q���扺�Ч��(y��ng)��Ҳ�Q�������sЧ��(y��ng)�������Ч��(y��ng)���扺�Ч��(y��ng)�y(t��ng)�Q�鉺�Ч��(y��ng)��
����늄әC���������扺�Ч��(y��ng)�M�й����ģ��D9 2��ʾ���扺�Ч��(y��ng)ʾ��D���Mһ���f������
���Ч��(y��ng)�����á�����w�ĘO��������D9-2�м��^��ʾ����(d��ng)�ډ���w���ϡ��±���ʩ������늉���
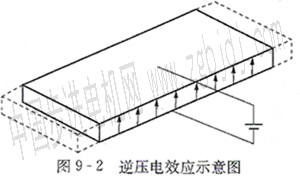
���ډ���w�����γ���������ؓ��늈��r������w���L�ȷ������쏈����֮�����ډ���w�ϡ��±���ʩ�ӷ���늈����t����w���L�ȷ���͕��տs����(d��ng)������wʩ�ӽ�׃늈��r���ډ���w�о͕����l(f��)��ij�Nģ�B(t��i)�ď�����ӡ���(d��ng)��늈��Ľ�׃�l���c����w�ęCе�C���l��һ�r������w���M��Cе�C���B(t��i)���ɞ鉺����ӡ���(d��ng)����l����20kHz���ϕr���͌��ڳ���ӡ�
�����E�A�\�Ӽ�������
������dz���늄әC������������l�������(q��)��Դ�����á����ǣ����������ⳬ��Ӷ������(q��)�����ã�����횾߂�һ�����ΑB(t��i)�������λ�Ƶ�܉�E��һ�E�A�r���ž����B�m(x��)�Ķ����(q��)�����á�
�D9-3��ʾ�|(zh��)�c�ęE�A�\��ʾ��D���O(sh��)����(����)���oֹ��B(t��i)���c�D(zhu��n)�ӱ�����һС�g϶����(d��ng)���Ӯa(ch��n)������ӕr�����ϵĽ��|Ħ���c(�|(zh��)�c)A�������\�ӣ�܉�E��һ�E�A����(d��ng)A�c�\�ӵ��E�A���ϰ�A�r�����c�D(zhu��n)�ӱ�����|����ͨ�^Ħ�����Ó܄��D(zhu��n)�����D(zhu��n)����(d��ng)A�c�\�ӵ��E�A���°�A�r�����c�D(zhu��n)�ӱ���Ó�x��������س̡�����@�N�E�A�\���B�m(x��)������M����ȥ���t���D(zhu��n)�Ӿ����B�m(x��)�Ķ���܄����á��Ķ�ʹ�D(zhu��n)���B�m(x��)��������D(zhu��n)����ˣ�����늄әC���ӵ��΄�(w��)���Dz��ú����ĽY(ji��)��(g��u)��ͨ�^���N��ӵĽM�ρ��γəE�A�\�ӡ�
��ô�����Ӳ����γəE�A�\����?�O(sh��)�Ѓɂ����g���ֱ�����λ��ux��uy�������ɺ��C����γɣ���ӽ��l�ʞ��0������քe���x�ͦ�y���r�g��λ������

������ȥ�r�gt���t��

ʽ(9-2)��,��(d��ng)��=n��(n=0,��l����2����)�r���ɂ�λ�ƞ�ͬ���\�ӣ��ϳ�܉�E
��һ�lֱ������(d��ng)�ס�n�Еr����܉�E��һ�E�A�������ڦ�=n�С��У�2�r��һҎ(gu��)�t�E�A����ͬ��λ
��r�ęE�A�ΑB(t��i)��D9 -4��ʾ��
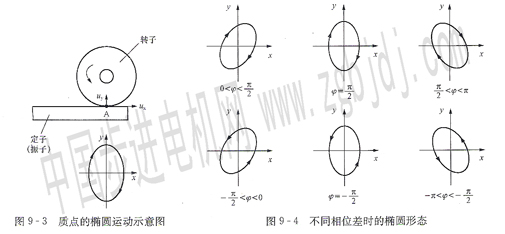
�ɴ˿�Ҋ����λ���ȡֵ�͛Q���˙E�A�\�ӵ����D(zhu��n)����(d��ng)��>O�r���E�A�\�Ӟ�형rᘷ���(d��ng)�� �����в����γɼ����c
����ӑՓ����һ���|(zh��)�c�E�A�\�ӵ����á��ο�һ���|(zh��)�c�ęE�A�\��߀�������Ƅ��D(zhu��n)�Ӳ��(q��)��һ����ؓ�d������(y��ng)ԓ����һϵ���|(zh��)�c���B�m(x��)�E�A�\�Ӂ��Ƅ��D(zhu��n)�����D(zhu��n)��Ҳ�����f�@Щ�|(zh��)�c��Ҫ�M���в����|(zh��)���\�ӡ�����(j��)���ӌW(xu��)��Փ����·��ֵ��ȡ��l����ͬ���r�g�ͿՆ������У�2�ă����v���B�Ӻ��γ�һ���ϳ��в���
��D9 5(a)��ʾ�����O�������෴�ĉ���w����ճ�Y(ji��)�ڏ����w�ϣ���(d��ng)�ډ���w�O������ʩ�ӽ�׃늉��r������w���L�ȷ���?q��)��a(ch��n)��������s��׃����һ���ļ���늉��l�ʦ�0�£������w�ό��a(ch��n)����D9-5(b)��ʾ���v�����䔵(sh��)�W(xu��)���_ʽ��

ʽ�У��֞�M�����ˣ�y��v�����ˣ��Ξ��v���������˞��v�����L��
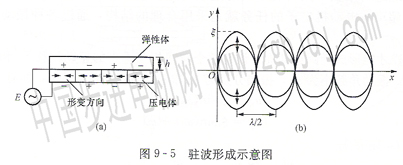
�O(sh��)�ڏ����w��ͬ�r���ڃ����v��A��B���������l��ͬ���0������ͬ��Σ����Lͬ��˲����ڕr�g�Ϳ��g�Ͼ����У�2����
��ϳɞ�

�@��һ���l�ʞ��0��������Ρ����L��˵��в���
�ڭh(hu��n)���в��ͳ���늄әC�У������ϵĉ���մɭh(hu��n)���в��γɵĺ��ģ�����늘O������D9��6��ʾ�����С�������������ʾ�O��������մ�Ƭ����һ��Ҏ(gu��)�ɷָ�O����֞�A��B�����^(q��)��������g�������У�2(1��4���L)�����ҷքeʩ���ڕr�g��Ҳ���У�2�ĸ��l�����(E1��E2)A��B����քe�ڏ����w�ϼ����v���������v���B�Ӻ��γ�һ���ض��ӈA�ܷ���ĺϳ��в����Ƅ��D(zhu��n)�����D(zhu��n)��
����մ�Ƭ�ĺ�țQ������һ��늉����Ƿ��܉������������մ�Ƭ̫��(����1��5mm)���t��ͨ����r�²��������������մ�Ƭ̫��(С��O��3mm)���t�ڸ��l�C���l���£�������׃�^������װl(f��)�����ѣ����Ҽӹ��y��Ҳ���������⣬����մ�Ƭ�ĺ�Ȍ�������ӵĹ����C���l��
Ӱ��^��ͨ��ȡ���Ȟ�0��5��0��8mm��
���Ͽ�Ҋ���Ƀɂ��v���B�Ӷ��γ��в����@�ڙC�����c늙C�W(xu��)�е����D(zhu��n)�ň���Փ���T������֮̎���ɱ���������֪������(d��ng)�چ����@�M��ͨ�ˆ��ཻ������r�a(ch��n)�������}��ň�������Ѓɂ��є�(sh��)��ͬ�����g����90��늽Ƕȵ��@�M����(d��ng)������ͨ�˷�ֵ��ȡ��r�g��λ����90��Č��Q��������r��
���a(ch��n)���ăɂ��}��ň��ĺϳɾ���һ���A�ε����D(zhu��n)�ň������D(zhu��n)�ň����D(zhu��n)��ȡ�Q��������������@������w�е��v���c�����}��ň�������(y��ng)�����ϳ��в��c���D(zhu��n)�ň�������(y��ng)��������늄әC���в��c����늙C�����D(zhu��n)�ň�(li��n)ϵ�����������ڌ��в��ͳ���늄әC����ԭ�������⡣
�ġ��D(zhu��n)���\���ٶ�
����ͨ�^���������w����������һ�c���\��܉�E�����_���D(zhu��n)���\�ӵ��ٶȡ�
����(j��)ʽ(9-5)��������r��f�������w������ij�cP�Ŀv�����λ�ƞ�

�O(sh��)�����w�ĺ�Ȟ�H���tP�c�ęM�����λ�ƞ�

��ʽ(9 6)��ʽ(9��7)����

�ɴ˿�Ҋ�������w����������һ�c���\��܉�E��E�A�Σ��@�N�E�A�\��ʹ�Ï����w�����|(zh��)�c���D(zhu��n)�Ӯa(ch��n)���B�m(x��)�Ķ���܄����ã����D(zhu��n)�ӵ��\�ӷ����c�в������෴����D9-7��ʾ(�D9��7��С���^��ʾ�����w�����|(zh��)�c��˲�r�ٶ�)���@Ȼ�������׃�����Դ��늉��O�ԣ�����Ը�׃�D(zhu��n)�ӵ��\�ӷ���
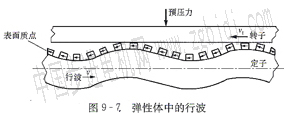
����(j��)ʽ(9 7)�������w�����|(zh��)�c�ęM���\���ٶȞ�

�M���ٶȵ�****ֵ��(y��ng)���F(xi��n)���в��IJ����̎���˕r�ı����|(zh��)�c�]�пv���ٶȣ������M���ٶ��c�в������෴(Ҋ�D9-7)���������D(zhu��n)�ӽ��|��֮�g�]�л��ӣ��t�D(zhu��n)�ӵ��\���ٶ��c����̎�|(zh��)�c�ęM���ٶ���ȣ���ֵ��

ʽ�У�̖ؓ��ʾ�D(zhu��n)�ӵ��\�ӷ����c�в������෴��
���H�ϣ������D(zhu��n)�ӽ��|��֮�g�Ļ������y��ģ���˳���늄әC�D(zhu��n)�ӵČ��H�\���ٶȿ��ǵ���ʽ(9-10)��ֵ��
�O(sh��)�в��ڶ��ӏ����w�еĂ����ٶȞ�����в��Ļ������Կ�֪

�@�ӣ��D(zhu��n)���\���ٶ��ֿɌ���

��Ҋ�����в������ٶȦԞ��ֵ����r�£���׃����늉����l��f0���Կ��ٸ�׃�D(zhu��n)�ٵ�����һ���ķǾ��ԡ�����׃����늉��Ĵ�С������׃�в�������Σ�Ҳ���Ը�׃�D(zhu��n)�١�������ԉ���w�扺�Ч��(y��ng)�ķǾ��ԣ��t�D(zhu��n)�ٿ����S����늉�������׃�����@���dz���늄әC׃���{(di��o)�ٵ����c��
�塢��������
һ����ԣ�����늄әC�Ĺ��������c늴�ʽֱ���ŷ�늄әC��ƣ�늄әC���D(zhu��n)���S���D(zhu��n)�ص�������½������ҳʬF(xi��n)һ���ķǾ��ԡ�������늄әC��Ч�ʄt�c늴�ʽ늙C��ͬ��****Ч�ʳ��F(xi��n)�ڵ��١����D(zhu��n)�^(q��)�D9-8��ʾ�鳬��늄әC�Ĺ������ԡ�
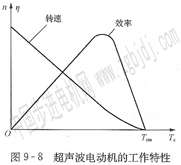
��ˣ�����늄әC�dz��m�ϵ����\�С����w���ԣ�����늄әC��Ч���^�ͣ��@������һ��ȱ�c��Ŀǰ���h(hu��n)���в��ͳ���늄әC��Ч��һ�㲻���^50����
|











