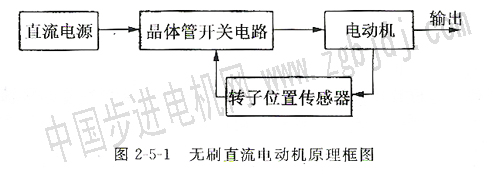
�oˢֱ��늄әC�Y����ԭ��������
�oˢֱ��늄әC��늄әC������(q��)�����ɲ��ֽM�ɡ�늄әC���ֽY���ͽ�(j��ng)�佻��ˮ��ͬ��늄әC���ơ��䶨�����ж����@�M���D(zhu��n)�������ˮ�ô��F��ɽ���\�е���Ҫ��߀Ҫ���D(zhu��n)��λ�Â�������λ�Â������z�y���D(zhu��n)lF�ň��S���Ͷ������@�M�S��������λ�ã��Q�������r�����@�M��ͨ늠�B(t��i)�����Q������(q��)������·ݔ���_�P���_�����B(t��i)����ͨ�����_늄әC���������@�M����ˣ��oˢֱ��늄әC�ɿ������Ɍ��T�������׃���(q��)�ӵ���λ�Â������������ƵĽ���ͬ��늄әC������һ�Ƕȿ����oˢֱ��늄әC�ɿ�����һ�����D(zhu��n)�ӵ��õ�ֱ��늄әC�� һ��ֱ��늄әC��늘��@�M���D(zhu��n)�Ӳ��������w�t��
�����ϡ���ˢֱ��늄әC�����^�Q���H���������@�M�ēQ���^�̡����ǽ������ˢ�͓Q��������ɵġ����oˢֱ��늄әC�����@�M�ēQ���^�̄t�ǽ�����λ�Â���������׃���Ĺ����_�P����ɵġ��oˢֱ��늄әC����ӓQ���������ֱͨ��늄әC�ęCе�Qͬ��������ֱͨ��늄әC���Ƶľ����Cе
���Ժ;����D(zhu��n)�أ�������ԡ�
(һ)�Y��
�oˢֱ��늄әCͨ������늄әC���w���D(zhu��n)��λ�Â������;��w���_�P�·�����ֽM�ɣ�����ԭ����D�ͽY�����D�քe��D2-5-1�͈D2-5-2��ʾ��
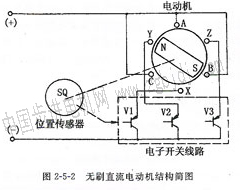
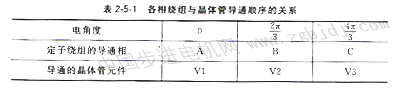
�oˢֱ��늄әC�ڽY������һ�_���b����ֱͨ��늄әC������늘з����ڶ����ϣ�ˮ�ŴŘOλ���D(zhu��n)���ϣ��c���D(zhu��n)�ŘOʽͬ��늙C������늘��@�M������@�M�������@�M�քe�c���w���_�P�·�еĹ����_�PԪ�����B�ӡ�����A���c���w��v1��B���cv2��c���cV3��ӡ�ͨ�^�D(zhu��n)��λ���������ʹ���w�ܵČ�ͨ�ͽ�ֹ��ȫ���D(zhu��n)�ӵ�λ�ý����Q������늓��@�M��������S���D(zhu��n)��λ�õĸ�׃��һ��������M�ГQ�������F(xi��n)�o���|ʽ����ӓQ��
�oˢֱ��늄әC���O��λ�Â����������������Ǚz�y�D(zhu��n)�Ӵň������ڶ����@�M��λ�ã����ڴ_����λ��̎�l(f��)����̖���ƾ��w��Ԫ����ʹ�����@�M������Q��λ�Â������ж�N��ͬ�ĽY����ʽ������ʽ��늴�ʽ���ӽ��_�Pʽ�ʹ���Ԫ��(����Ԫ��)��һ��Ҫ��B��
���ʽλ�Â����������ù����c�D(zhu��n)��λ�ý�֮�g�Č����Pϵ����ָ�������������Ԫ��(�����O�ܡ������O�ܡ���늳ص�)�������l(f��)�����̖ȥ��ͨ�_�P�·�������ľ��w�ܣ���ʹ�����@�M������˓Q�D2һ5-3��ʾ����һ�N���λ�Â�����������һ������С�Ĺ������ֺ��D(zhu��n)�S(li��n)����һ���Sͬ�D(zhu��n)�Ӈ��@һ�̶���Դ���D(zhu��n)��ͨ�^�����ڌ����ڶ����@�M�ׂ��_��λ���ϵĹ�늳�(�����ܵ��˹��������䣬���l(f��)���������̖)���z�y�������@�M�����Ҫ�Q��Ĵ_��λ�ã����ɹ�늳ذl(f��)�������̖ȥ���ƾ��w�ܣ�ʹ�����Ķ����@�M�M������ГQ��
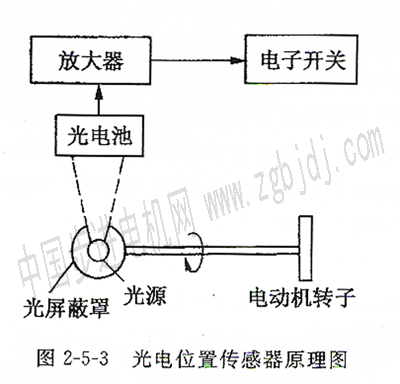
���λ�Â������l(f��)�������̖һ�㶼�^������Ҫ��(j��ng)�^�Ŵ����ȥ���ƾ��w�ܡ������λ�Â�����ݔ������ֱ��늉����������M���������@������һ����(y��u)�c��
(��)����ԭ��
������һ�_���þ��w���_�P�·�M�ГQ���ăɘO�����@�M�����й��λ�Â������ğoˢֱ��늄әC�������f���D(zhu��n)�خa(ch��n)���Ļ���ԭ�����D2 5��4��ʾ늄әC�D(zhu��n)���ڎׂ���ͬλ�Õr����늘��@�M��ͨ늠�r����ͨ�^늘��@�M�ńݺ��D(zhu��n)���@�M�ńݵ�����ã��������oˢֱ��늄әC�D(zhu��n)�صĮa(ch��n)����
(1)��늄әC�D(zhu��n)��̎�ڈD2��5-4˲�r����Դ���䵽��늳�Pa�ϣ�����늉���̖ݔ���������ɂ���늳�Ph��Pc�t�oݔ��늉�����Pa��ݔ��늉��Ŵ��ʹ���w��Vl�_ʼ��ͨ(Ҋ�D2��5-2)�������w��V2��V3��ֹ���@�r��늘��@�MAx�����ͨ�^��늘дń�Fa�ķ�����D2��5-4(a)��ʾ��늘дń�Fa���D(zhu��n)�Ӵń�����ñ�a(ch��n)���D(zhu��n)�أ�ʹ�D(zhu��n)����형rᘷ������D(zhu��n)��
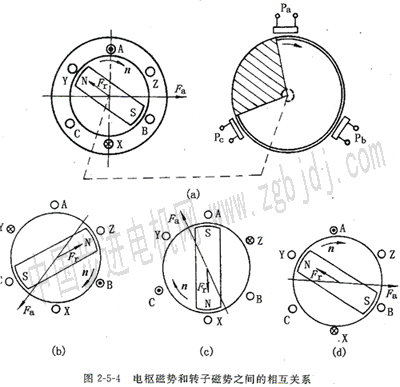
(2)��늄әC�D(zhu��n)���ڿ��g�D(zhu��n)�^2�У�3늽Ƕȕr����������Ҳ�D(zhu��n)�^ͬ�ӽǶȣ��Ķ�ʹ��늳�Pb�_ʼ��늉���̖ݔ���������ɂ���늳�Pa��Pc�t�oݔ��늉���Pbݔ��늉��Ŵ��ʹ���w��V2�_ʼ��ͨ(Ҋ�D2��5 2)�����w��V1��V3��ֹ���@�r��늘��@�MBY�����ͨ�^��늘дń�Fa�ķ�����D
2��5 4(b)��ʾ��늘дń�Fa���D(zhu��n)�Ӵń���������a(ch��n)�����D(zhu��n)�أ�ʹ�D(zhu��n)���^�m(x��)��형rᘷ������D(zhu��n)��
(3)��늄әC�D(zhu��n)���ڿ��g�D(zhu��n)�^4�У�3늽Ƕȕr����늳�Pcʹ���w��V3�_ʼ��ͨ��V1��V2��ֹ������늘��@�MCZ�����ͨ�^��늘дń�Fa�ķ�����D2 5��4(c)��ʾ�����c�D(zhu��n)�Ӵń���������a(ch��n)�����D(zhu��n)�أ���ʹ�D(zhu��n)����형rᘷ�ͬ���D(zhu��n)��
��늄әC�D(zhu��n)���^�m(x��)�D(zhu��n)�^2�У�3늽Ƕȕr���ֻص�ԭ������ʼλ�á��@�rͨ�^λ�Â��������؏�����������Q����r�����ѭ�h(hu��n)�M�У��oˢֱ��늄әC��늘дńݺ��D(zhu��n)�Ӵńݵ�������®a(ch��n)���D(zhu��n)�أ���ʹ늙C�D(zhu��n)�Ӱ�һ���ķ������D(zhu��n)��
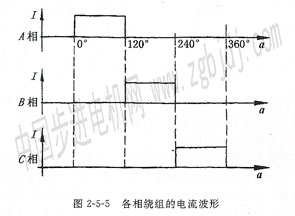
���������ӵķ������Կ��������@�N���w���_�P�·����Q��ğoˢֱ��늄әC�У����D(zhu��n)���D(zhu��n)�^2��늽Ƕȣ������@�M����3��ͨ늠�B(t��i)��ÿһ��B(t��i)�H��һ����ͨ�������������ֹ������m(x��)�r�g�����D(zhu��n)���D(zhu��n)�^2�У�3늽Ƕ��������ĕr�g�������@�M�c���w�܌�ͨ�����Pϵ���2 5��1��ʾ�������@
�M������IJ�����D2��5 5��ʾ��
(��)����
�ɹ���ԭ����֪����Ҏ(gu��)�Y���ğoˢֱ��늄әC(���p�O������Y�B�ӷ�ʽ)�ஔ��һ�_���Ӻ��D(zhu��n)�ӵ��õġ�늘�ֻ��6�۵�����ֱ��늄әC��ֻ���^���ēQ�������ˢ��λ�Â������;��w�ܓQ���·����ˡ��@�ӣ��oˢֱ��늄әC�������Ժͅ���(sh��)�c����ֱ����ˢ늄әC���ơ�
�oˢֱ��늄әC늚ⷽ��ʽ�飺

ʽ�У��̞����ֱ��늉�(V)��i��˲�B(t��i)���(A)��Req���ֵ���(��)Leq���ֵ늸�(H)��KE���ֵ늉�����(sh��)(V��(rad��s))���؞��D(zhu��n)�ӽ��ٶ�(rad��s)��
��ʽ�����˸����@�M�Ļ��С�늘з�������Ĵň�׃�����@�M���׃���������غ��½��ؼ��D(zhu��n)�ٲ��ӵȴ�Ҫ���ء������е��ٟoˢֱ��늄әC����ȫ���Ժ��Ը��@�M���ԸУ�����ʽ����׃?y��u)�����ε���ʽ�?BR>
ʽ�У�Iav��ƽ�����(A)
�oˢֱ��늄әC���\�ӷ���ʽ�飺

����


�ں㶨�Դ늉�u�鳣��(sh��)�ėl���£���ʽ(2-5-1)��ʽ(2-5һ3�ɵã�

ʽ�У���0����Փ���d�D(zhu��n)��(rad��s)��TS����D(zhu��n)늴�����(N��m)��R������

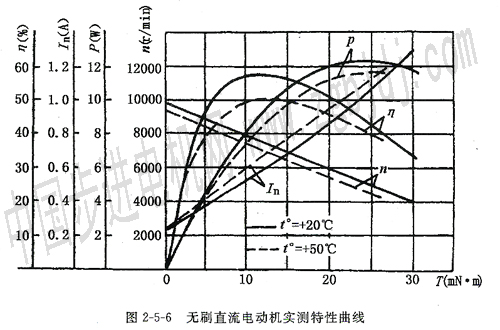
��������ʽ�f�������şoˢֱ��늄әC�Cе����(늴����أ��D(zhu��n)�����ԣ��D(zhu��n)�أ��������)�dzʾ��Եģ��c��ˢ����ֱ��늄әC��ͬ���D2 5 6��һ�_�oˢֱ��늄әC���y�����������D�нo�����D(zhu��n)��n(r��min)��ݔ���D(zhu��n)��T(mN��m)(T��TeһTf�����Iav(A)��ݔ������P(w)����Ч�ʦ�(����늄әC�͓Q���·)֮�g���Pϵ��߀�o���˭h(hu��n)���ضȞ�+20���50��r�����Ԍ��ȡ�
���ָ�������������������ƣ�ʹ�����п��܌�ԭ�ȵ���ˢֱ��늄әC�Q�ɟoˢ�ģ�������Ӱ�ԭ�b�õĿ����ܡ����ǣ�߀����˽�oˢֱ��늄әC���Է����ijЩ���c�����磺
(1)���B�m(x��)������(SI)�£���ˢֱ��늄әC��늉�����(sh��)KE���D(zhu��n)�س���(sh��)KT�M��KE��KT�Pϵ��������Փ������֪�����ڟoˢֱ��늄әC���f���������в����e��0��6����3��6��֮�g�����c�@�M����(sh��)���B�ӷ�ʽ������B(t��i)�����P���@�N���ӳ�˟oˢֱ��늄әC����������Ӻ��D(zhu��n)�ز����@һ���|(zh��)����ʹ�������˽�늄әC�����ԕr�������J��KT��KE��
(2)�oˢֱ��늄әCһ�����^���@��������Ӻ��D(zhu��n)�ز��ӣ��������̽o�������ֵIAV������Te��ָƽ��ֵ��
(3)�oˢֱ��늄әC�����c�Q���_�P���w�ܵ�͉����͵�ֵ������P���e�����}���{(di��o)�ƹ�����ʽ�r�����w���_�P�ٶȌ�늙C����Ҳ��һ���̶ȵ�Ӱ푡���ˣ��oˢֱ��늄әC�����ԑ������늙C�c�ض��Q���·����һ�����w�Ĺ������ԡ�
|











