���ཻ���ŷ�늄әC�đ���
���ཻ���ŷ�늄әC�ڹ��I�Ԅӻ��͇����F�����ĸ��N�Ԅӿ����b����������Ԫ����
���ڃ��ཻ���ŷ�늄әC�OӋ�������횝M��ʹ���еĿ������ܣ����ڞ�һ��Б�늄әC��ע�ص�Ч�ʵȷ��棬�������ŷ�늄әC�����ǟo�P�oҪ�ġ���ˣ����Ɍ������ŷ�늄әC����һ��Б�늄әC��ʹ�ã�����@�Ӻܲ�������
�����ŷ�늄әC���Ԅӿ���ϵ�y�е�ʹ����Ҫ��3�N��ͣ����ٶ��ŷ�ϵ�y��λ���ŷ�ϵ�y���S�ŷ�ϵ�y��
1���ٶ��ŷ�ϵ�y
ͨ�����әC�ߵ�ؓ�d�����ǽ���׃���ģ�����Դ��늉����l��Ҳ�ǽ���׃���ģ���ô�����ӌ�����\���ٶ�ͨ��Ҳ��׃���ġ���ˣ��ٶ��ŷ�ϵ�y��Ҫ�΄��DZ��ֱ��әC��(��Qؓ�d)������Ҫ�ľ��_�ٶ�(�^����1�N�ٶ�)�·����\�С��D3 3 21���ٶ��ŷ�ϵ�yʾ����
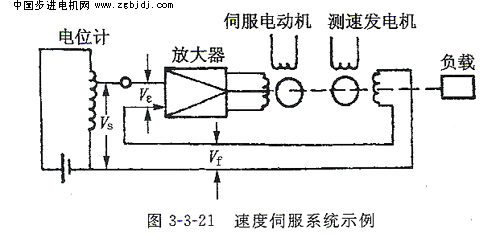
����ؓ�d���ٶ�ͬ�λӋ�A�Ƚo����늉�VSһ���������y�ٰl늙Cݔ���ķ���늉�vf�cVS�M�б��^���õ�ƫ��늉�V�ţ����ŷ��Ŵ����Ŵӵ������ŷ�늄әC�����@�M�ߣ��ŷ�늄әC��ؓ�d��һ�����D���\�С�
��ؓ�d��������r���ŷ�늄әC���D���½���V��Ҳ���ͣ����V�����Ķ�ʹ�����ŷ�늄әC�����@�M�ϵ�늉���������늉�Ҳ�S�������ŷ�늄әC���D���S֮������ԭ�����D�١���֮����ؓ�d���pС���t�ŷ�늄әC���D�����ߣ�vfҲ���ߣ����V�ŜpС���Ķ������ŷ�늄әC�����@�M�ϵ�늉���������늉�Ҳ�S���pС��ʹ���ŷ�늄әC���D���S֮������ԭ�����D�١���׃��ֵ���͕����µ��D���·����\�С��@�Ӿ��_���˺��ٿ��Ƶ�Ŀ�ġ�
2��λ���ŷ�ϵ�y
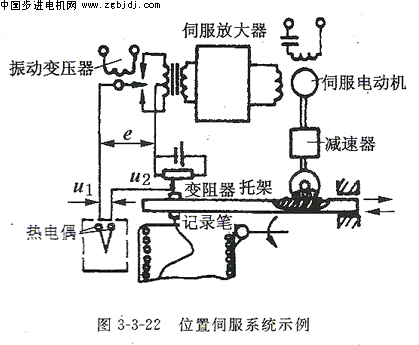
����λ���ŷ�ϵ�y���b�úܶ࣬���磺�ǶȔ�����ݔ�b�ú�λ��ָʾ�b�õȡ��D3 3 22��λ���ŷ�ϵ�yʾ�����@��һ�NȽ���λӋ���Á��Ԅәz�yij����ֵ(��ض�)�ăx����
�D3��3��22��ӛ䛠t�ӻ������ӟ��O��ضȵ��Ԅ��λ֭���ß��ż��y���ضȡ����ż�a���ğ�늄ݡ�t�c�ضȳ����ȣ�ͬ���λ����ȡ����늉����M�б��^���õ�늉�ƫ��e�����ŷ��Ŵ����ϣ��ɷŴ���ݔ��˵����׃�������@һֱ��늉�׃�齻��늉������Ŵ����Ŵ��ӵ������ŷ�늄әC�Ŀ����@�M�ϡ��ŷ�늄әCͨ�^�p�����Ƅ�ӛ䛃x�����мܡ�����׃�������|�^��ӛ䛹P���b���м��ϡ����ŷ�늄әC���D�r���|�^�ͱ��Ƅӣ�늉�U2��l��׃����ֱ���ŷ��Ŵ���ݔ��˵�늉�������r���ŷ�늄әC��ֹͣ���D���ɴ˿ɿ�����ֻ�Ю�U1=U2�r�����ܳ��F�oֹ��B��Ҳ��ӛ䛹P����ӛ䛼����ϵ�λ�þ��Ǵ���ضȵ���ֵ�����ض�ƽ����׃���r�������ŷ�늄әC�㲻����Ƅ��мܣ�ʹ늉�U2�S�rͬ���ż�́���늉���ƽ�⡣�b���м��ϵ�ӛ䛹P��͡���ۙ�����t�ص�׃������ӛ䛼�����ӛ�ضȵ���ֵ����
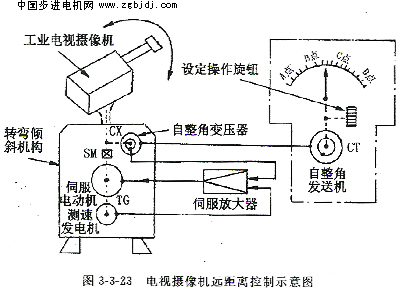
�D3- 3 -23��ʾ���ǹ��I�ҕ�z��C���h���x����ϵ�y���@�nj����c�h���x�Oҕ�Ĕz��C���D�Ƕȿ����b�ã���С�߷����Ԏ��Мy�ٰl늙C�Ľ����ŷ�늄әC���ӡ�
�ڂ���Ԫ���Լ����әC���ϑ����ÿɿ��Ըߵ������ǙC�ŷ��C�����F�ڣ����O������ָ��{��A�c�ϣ��z��C�t�OҕA�c�����O���c�{��B�c�r���O�����������ǙC�l�͙CcT�����D�C���ȵ�������׃����cx�g�a���ǶȲcx����ƫ����̖늉�ݔ���ŷ��Ŵ������ɴ��M��늉����ʷŴ����ŷ�늄әC���z��C�D��B�c�������ǙC�ǶȲ���㣬늄әCֹͣ�D�ӣ������ꮅ��
3���S�ŷ�ϵ�y
�S�ŷ�ϵ�yͬλ���ŷ�ϵ�y������Ƶģ�ֻ���^�DZ��S�İl���������׃���r��������ֵ�c��ͬ��׃�������磺�����B���Ԅ��λӋ�е�ӛ䛹P����ӛ䛼����ϵ�λ�þ��Dz����S�ضȵ�׃���������ٽ�B���_�쾀ƫ��Ȧͬ���S�ŷ�ϵ�y��ʾ����Ҋ�D3-3-24��
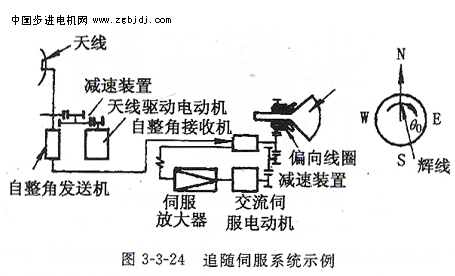
�쾀��늄әCͨ�^�p���b�����쾀�������ǰl�͙C��ijһ�ٶȻ��D�r�������ǰl�͙Cͬ�����ǽ��ՙC֮�g���ڡ�ʧ�{�ǣ����ՙCݔ���@�M�a��ͬʧ�{����������ƫ��늉�����ƫ��늉����ŷ��Ŵ����Ŵӵ������ŷ�늄әC�Ŀ����@�M�ϣ�ʹ�����ŷ�늄әC���D��ͨ�^�p���b���������ǽ��ՙC��ƫ��Ȧ�������ǰl�͙C���D�ٶ�ͬ�����D���@��һ�����͌��F�����_�쾀�cƫ��Ȧ����ͬ���ٶȻ��D���Q��֮��ƫ��Ȧ���ࡰ��ۙ���S���_�쾀ͬ�����D��
�D3��3��25�Ǻ㶨�����c���ԄӸ�ۙ�C�������C���nj��Ƅӵİl���w���nj��l���w�Ƅӵĺ㶨�����c�M���h���x�ԄӸ�ۙ�Ŀ���ϵ�y�������Թ�Wϵ�y��ݔ���c�OӋ�Ĺ����Ȼ���ֵ��ȕr��늄әCM���D�ٞ��㡣�C�����ý����ŷ�늄әC�������y�ٰl늙C�������ۙ�C�������{��֮�á�
������ۙ�Ĺ������c�O���ÿ̶ȣ���ָʾӋ�������λ�����Ƅ��ܹⲿ�֣������x�������@�r�Ԅ�ƽ��ϵ�y�ɭh��Ԅӵİ��㶨�����c��ۙ������ӛ��ƄӠ�B���Ɍ��ڙC����ֱ���ӵ��λӋ늉�����ӛ䛃x����ʹ�Ƅ����cԓ늉��ɱ�����
|











