�B�m(x��)���ɘӮ��Y(ji��)��(g��u)����ͬ������
���ҏ�(qi��ng)1�����1�����x2
��1��ɽ��W(xu��)��У�^(q��)�Ժ���I(y��)Ӌ(j��)��C(j��)���ƹ��̺ӱ�ʡ���c(di��n)��(sh��)�(y��n)�ң��ӱ��ػʍu066004��2��䓟��F�S���ӱ���ɽ063000��
ժ Ҫ���о���һ�(l��i)Y(ji��)��(g��u)����ȫ��B(t��i)ͬ�����Ɔ�(w��n)�}���քe��CoulleLϵ�y(t��ng)�cRosslerϵ�y(t��ng)��Ŀ��(bi��o)��푑�(y��ng)ϵ�y(t��ng)������backstepping�����O(sh��)Ӌ(j��)�˱��փ�ϵ�y(t��ng)֮�g���Р�B(t��i)ͬ�����B�m(x��)�r(sh��)�g�����������˰��B�m(x��)���������õؑ�(y��ng)�õ�Ӌ(j��)��C(j��)�ɘӿ���ϵ�y(t��ng)�У����B�m(x��)�������O(sh��)Ӌ(j��)�Ļ��A(ch��)֮�ϣ����ڲɘ�ϵ�y(t��ng)��(sh��)�ð�֝u����(w��n)����Փ�����M(j��n)���˲ɘ�ͬ�������������O(sh��)Ӌ(j��)�о�������Y(ji��)���C�������O(sh��)Ӌ(j��)���B�m(x��)���ɘ�ͬ������������Ч�ԣ����M(j��n)һ���������O(sh��)Ӌ(j��)�IJɘ�ͬ�����������c���B�m(x��)������ֱ���xɢ�����õĿ�������ȣ����и�����Ք��ٶȣ������ڱ��Cϵ�y(t��ng)��(w��n)����ǰ����߀���и����IJɘ������x����
�P(gu��n)�I�~�����Y(ji��)��(g��u)�����磻ͬ�����ɘӿ��ƣ�������
�ЈD���(l��i)̖(h��o)��TP 273 �īI(xi��n)��(bi��o)�R(sh��)�a��A
1����
�ѳɞ�Ǿ�(xi��n)�ԿƌW(xu��)�о����c(di��n)�Ļ�������cͬ�����ڱ���ͨ�š��t(y��)�W(xu��)��������I(l��ng)����кܴ�đ�(y��ng)�Ý����Ͱl(f��)չǰ�����F(xi��n)������Ļ��������ж���(sh��)������ͬ�Y(ji��)��(g��u)����ͬ�������Y(ji��)��(g��u)����ͬ��Ҳ��Խ��(l��i)Խ����ܵ��˂����P(gu��n)ע���еĮ��Y(ji��)��(g��u)ͬ��ֻ��(sh��)�F(xi��n)�ɻ���ϵ�y(t��ng)�g��ij��(g��)��(du��)��(y��ng)��B(t��i)��ͬ����������Coulletϵ�y(t��ng)��Ŀ��(bi��o)ϵ�y(t��ng)����Rosslerϵ�y(t��ng)����푑�(y��ng)ϵ�y(t��ng)���o����һ�N���փ�ϵ�y(t��ng)�g3��(g��)��B(t��i)�քeͬ�����B�m(x��)�r(sh��)�g������Backstepping�O(sh��)Ӌ(j��)����������ͨ�^(gu��)����ԇ�(y��n)�C���˿���������Ч�ԡ�
����Ѱ����B�m(x��)������Փ���O(sh��)Ӌ(j��)�Ŀ�����ֱ�ӑ�(y��ng)�õ�Ӌ(j��)��C(j��)�ɘ�ϵ�y(t��ng)֮�У��ɘ�ϵ�y(t��ng)�����S���ɘ����ڵ����Ӷ�څ�ڲ���(w��n)���������ڷǾ�(xi��n)�Կ����I(l��ng)���(n��i)ᘌ�(du��)�ɘӺ�ϵ�y(t��ng)�ܷ�(w��n)�����Լ�������Σ��ͳ���һ��(g��)��Ҫ���о��n�}��
���������O(sh��)Ӌ(j��)���B�m(x��)ͬ���������Ļ��A(ch��)�ϣ����ڲɘ�ϵ�y(t��ng)���(sh��)�Ýu����(w��n)����Փ������(du��)�B�m(x��)ͬ���������M(j��n)�������O(sh��)Ӌ(j��)������Y(ji��)���������O(sh��)Ӌ(j��)�IJɘ�ͬ���������c���B�m(x��)ͬ��������ֱ���xɢ�����õĿ�������ȣ����и�����Ք��ٶȺ����IJɘ������x�����@�Ӿ͞�������㷨�Č�(sh��)�F(xi��n)��(zh��ng)ȡ��������\(y��n)��r(sh��)�g��
2�B�m(x��)�r(sh��)�g�������O(sh��)Ӌ(j��)
��Rosslerϵ�y(t��ng)����푑�(y��ng)ϵ�y(t��ng)����ͬ���������������3��(g��)�����У��˕r(sh��)ϵ�y(t��ng)�Ą�(d��ng)���W(xu��)����������
��Coulletϵ�y(t��ng)���Ҙ�(bi��o)ϵ�y(t��ng)���䷽�����£�
��(d��ng)����(sh��)a1=0 2��b1=0 2��c1= 5.7��a2=-0. 45��b2=1.1��c2=0.8�r(sh��)����ϵ�y(t��ng)��̎�ڻ����B(t��i)�����x�`��׃����
��(du��)ʽ(4)��һ�A��(d��o)��(sh��)����ʽ(1)���ɵ�
���˱��ڲ���backstepp/ng�����M(j��n)���O(sh��)Ӌ(j��)����Ҫ��(y��n)�������ǽY(ji��)��(g��u)�������Ƚ��Q��ʽ��e1��e2����(bi��o)���ٻ��Q��һ��(g��)�����c�ڶ���(g��)���̵�λ�ã��
�t�`��ϵ�y(t��ng)��B(t��i)����ʽ(5)�ɸČ�(xi��)��
�˕r(sh��)ֻҪ�xȡ���m�Ŀ���ݔ��uʹϵ�y(t��ng)(7)���`��׃��e1��i=1��2��3��ȫ���Ք����㣬���܌�(sh��)�F(xi��n)ϵ�y(t��ng)(1)�cϵ�y(t��ng)(2)��ͬ���������Lԇʹ��back stepping����������ȡͬ��������u��
���](e1)��ϵ�y(t��ng)����e2��(d��ng)����ϵ�y(t��ng)e1��̓�M����������w1=e1�xȡ��һ��(g��)Lyapunov����(sh��)��  �tv1(e1)����(e1)��ϵ�y(t��ng)�ĕr(sh��)�g��(d��o)��(sh��)V1(e1)=eiei =el(e2 +aie, +A)����w2=e2- al�����Ҧ�=-k1el -alel -A���tv1(e1)= -k1w1 2 +w2e1�����У�k1���x����������(sh��)������Ҳ���@�ӡ� ����(l��i)���](e1��e2)��ϵ�y(t��ng)����e3��(d��ng)����̓�M���������xȡ��2��(g��)Lyapunov����(sh��)��
�tV2(e1��e2)��(e1��e2)��ϵ�y(t��ng)�ĕr(sh��)�g��(d��o)��(sh��)��
��]ϵ�y(t��ng)��e1��e2��e3�����xȡ��
�tV3��e1��e2��e3���ĕr(sh��)�g��(d��o)��(sh��)��
����xȡ��
����ʹe2��e3�S�r(sh��)�gtҲ���Ք���0����(sh��)�F(xi��n)Coulletϵ�y(t��ng)�cRisslerϵ�y(t��ng)3��(g��)��B(t��i)����ȫͬ�������ڿ������O(sh��)Ӌ(j��)ǰ�Ȍ�(du��)푑�(y��ng)ϵ�y(t��ng)�M���a(b��)�����ƣ�ʹ�a(b��)������`��ϵ�y(t��ng)����A��B�(xi��ng)���xȡ��
�t�a(b��)�����푑�(y��ng)ϵ�y(t��ng)��
��Ȼ����ʽ��3�����x���`��׃������(du��)�@Щ׃����һ�A��(d��o)��(sh��)����ʽ��11���У��ɵã�
����ǰ��ķ������Qʽ��12���е�e1��e2���±������Q��һ��(g��)�����c�ڶ���(g��)���̵�λ�ã�Ȼ����backsteping������(du��)ϵ�y(t��ng)��12�������M(j��n)�п������O(sh��)Ӌ(j��)�����ǵõ�
����ٽ��Q��(hu��)e1��e2���±����ã�
3�ɘӿ������O(sh��)Ӌ(j��)
���]����ϵ�y(t��ng)��
���O(sh��)f (O)=0��f��g�B�m(x��)�����ɘӿ���ϵ�y(t��ng)�п�����̖(h��o)U(t)=u(KT)=u(k)����ֶ��B�m(x��)��̖(h��o)����B(t��i)׃����(k)=��(kT)�ͦ�(k)=��(KT)�քe�����ڲɘӕr(sh��)��kT���y(c��)�������У�T>O��ɘ����ڣ��Ǿ�(xi��n)��ϵ�y(t��ng)(14)����(du��)��(y��ng)�ľ��_�xɢģ�ͺ�Euler�����xɢģ�ͷքe��ʾ��
�����r�£�ϵ�y(t��ng)( 17)��(du��)��(y��ng)�ľ��_�xɢģ���Dz��ɵõģ���ʹ�ɵ�����Ҳ���ܱ�����ʽ(17)�ć�(y��n)�����Y(ji��)��(g��u)����Euler�����xɢģ�Ͳ����������܉�ģ�͵ć�(y��n)�����Y(ji��)��(g��u)���@�������µ��O(sh��)Ӌ(j��)���x�÷Ǿ�(xi��n)��ϵ�y(t��ng)Euler�����xɢģ�͵�ԭ��
��(du��)�xɢϵ�y(t��ng)ģ�ͣ�
������2��(g��)���x��
���x1 �Q(ch��ng)ϵ�y(t��ng)(21)�ǰ��(sh��)�Ýu����(w��n)��( SPAS)�ģ�������ں���(sh��)��EKl����(du��)����������(sh��)��(sh��)��(du��)(��,��),���� T>0ʹ��(du��)���кͳ�ʼ��B(t��i)ϵ�y(t��ng)(18)�Ľⶼ�M(m��n)��.
�ɶ��xl����ֱ�ӵó������ϵ�y(t��ng)ʽ(21)��ȫ�֝u�M(j��n)��(w��n)���ģ���ô��ض��ǰ��(sh��)�Ýu����(w��n)����
���x2 �Q(ch��ng)�B�m(x��)������(sh��)V��Rn-,R��ϵ�y(t��ng)(21)�İ���?q��)��Ýu����(w��n)��Lyapunov����(sh��)���������K��ʹ�Ì�(du��)��������(sh��)��(sh��)��(du��)������L��T >���M(m��n)�������ʽ�ӣ�
����l���(Vt��ut) ����ôurҲ����ʹFTSPAS��
���挢�M(j��n)�вɘ�ͬ���������O(sh��)Ӌ(j��)�����Ƚ��Q�`��ϵ�y(t��ng)(12)��׃��ei��e������(bi��o)��Ȼ�������Euler�����xɢģ�ͣ�
��
�tʽ��23�����ԸČ�(xi��)�飺
����(j��)�īI(xi��n){8}��ӆ��2��������܉�ʹϵ�y(t��ng)ʽ��16������?q��)��Ýu����(w��n)����һ��(g��)SPAS��(du��)��V��K����v��K���������У�
���ԣ�V��K����v��K�������Ҳ�ϵ�y(t��ng)��Euler�����xɢ��ʽ��14����һ��(g��)SPAS��(du��)���ɶ���q��֪�������V��K��ͬ�ӿ���ʹ��ϵ�y(t��ng)ʽ���_�xɢģ�ͱ��ְ���?q��)��Ýu����(w��n)����
�ٰ����ÿ�����v(K)������24���У�Ȼ���ٴν��Qe1��e2���±����ɵ���K�IJɘ�����ͬ�����������_(d��)ʽ�飺
ͨ�^(gu��)���^U3��K������֪��
ͨ�^(gu��)Ӌ(j��)����Եó���
�ɴ˿��Կ��������O(sh��)Ӌ(j��)�IJɘӿ�����u(k)��ֱ�Ӱ��B�m(x��)�������xɢ�����õ��Ŀ��������и�����Ք��ٶȡ�
4����ԇ�(y��n)
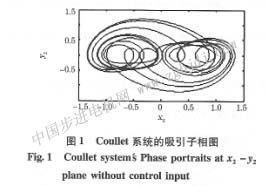
Ŀ��(bi��o)Coulletϵ�y(t��ng)�����D�еĻ��������ӣ���D1��ʾ��
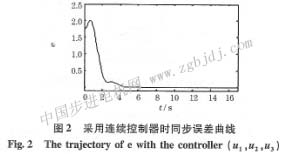
��(d��ng)�����B�m(x��)�r(sh��)�gͬ��������(u1��u2��u3)�t푑�(y��ng)ϵ�y(t��ng)ͬ���`��e(t)=(e12(t)+ e22 (t)+ e32 (t))�S�r(sh��)�gt�����Ք���0����D2��ʾ��
�@�����ڿ�����(u1��u2��u3)������ϵ�y(t��ng)�g���Р�B(t��i)��������ͬ�����O(sh��)���ɘ����ڞ�O l s���ɷN�ɘӿ�����ͬ���`����^����D3��ʾ��
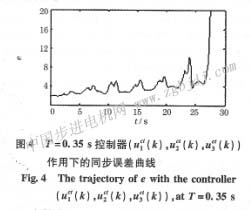
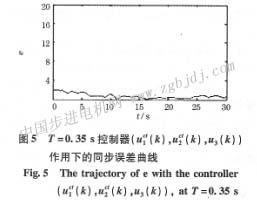
�ɘ�ϵ�y(t��ng)�����S���ɘ����ڵ����Ӷ�څ�ڲ���(w��n)������(d��ng)T=0. 35 s�r(sh��)���������ѽ�(j��ng)����ʹϵ�y(t��ng)��(w��n)�����˕r(sh��)��ϵ�y(t��ng)�`��e(t)��D4��ʾ��
���ڿ����������£�푑�(y��ng)ϵ�y(t��ng)������һ���`����cĿ��(bi��o)ϵ�y(t��ng)����ͬ�����`��e(t)�S�r(sh��)�g׃������(xi��n)����D5��ʾ��
5�Y(ji��)�Z(y��)
������Coulletϵ�y(t��ng)��Ŀ��(bi��o)ϵ�y(t��ng)����Rosslerϵ�y(t��ng)��푑�(y��ng)ϵ�y(t��ng)���քe�O(sh��)Ӌ(j��)���B�m(x��)�������Ͳɘӿ�������(l��i)��(sh��)�F(xi��n)��ϵ�y(t��ng)֮�g��ȫ��B(t��i)ͬ�������M(j��n)һ�����^�����O(sh��)Ӌ(j��)�IJɘӿ������c���B�m(x��)������ֱ���xɢ�����õĿ�����֮�g�����ܣ�����Y(ji��)���C�������O(sh��)Ӌ(j��)�������ă�(y��u)Խ�ԡ�
|