ǰ������̓����ޔز����ğoˢֱ��늙C�������о�
���٣��R���䣬��̓�ѣ��ܝ�
(�������I(y��)��W�Ԅӻ��WԺ������710072)
ժҪ���о��˻���ǰ������̓����ޔز����ğoˢֱ��늙C���Ʒ�������B���·��Ӳ���Y��������������ԓ��������늙C��������D�ز��ӣ�����늙C�Ƅ����Ե�ԭ������Matlab/Simulink�h(hu��n)���½����˿���ϵ�y(t��ng)�ķ���ģ�ͣ��o���˷���Y�����c���y(t��ng)�Y���µķ���Y���M���ˌ��ȡ��Y������������̓����ޔز����܉����@�p�ٟoˢֱ��늙C������D�ز��ӣ�����늙C�Ƅ����ԡ�
�P�I�~���oˢֱ��늙C���ز�����������ӣ�����ģ��
�ЈD���̖��TM36+1 �īI��־�a��A ���¾�̖��1001-6848(2010)02-0062-04
0�� ��
���Č��oˢֱ��늙C��������M����Ԕ���ķ������������ǰ������̓����ޔز����ķ����p��늙C������D�ز��ӣ�ͬ�r����늙C�Ƅ����ԡ�
��Matlab/Simulink�ľ��½���������̓����ޔز����ķ���ģ�Ͳ����䑪���ڟoˢֱ��늙C����ϵ�y(t��ng)��ͨ�^�c���y(t��ng)��ʽ�·���Y���Č��ȣ��C����ͨ�^ǰ������̓����ޔز����܉���Ч���Ɵoˢֱ��늙C�D�غ�������ӣ�ͬ�r����늙C�Ƅ����ܡ�
1���·�Y��
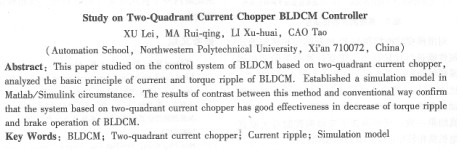
����ǰ������̓����ޔز����ğoˢֱ��늙C����ϵ�y(t��ng)���·�Y����D1��ʾ�����·������̓����ޔز���������ȫ����׃���M�ɡ�
���y(t��ng)������ȫ����׃���ڹ����r�����������_�P��ȫ�����p�O���{�ƣ��֣��ΘO���{�ƣ�������PWM��B(t��i)�����Dl��ʾϵ�y(t��ng)�У������_�P��Tl~ T6������120�Ȍ�ͨ��ʽ�£����_ͨ���P���ɿ���������λ�Â�������̖�_���������_�P��T7��T8�����ڻ��aPWM��B(t��i)������Tl~ T6�����ڵ��l��B(t��i)���_�P�p�Ĵ��pС��늙C���ӕr����T7��D7���������ɽ����͔ز��·�����F늙C�{���{�١��Ƅӕr����T8��D8�����������cL����Boost�·��ʹ늙C���������Դ�����O��D9��Ҫ���ړQ�ౣ�o����ֹ��׃�����ʹ��P���r늸�����o�m(x��)����·���a����ēp�Ĺ��ʹܡ�
2������ӷ���
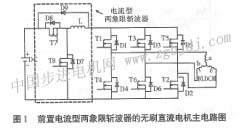
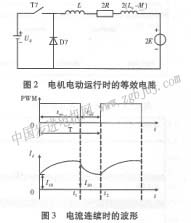
��늙C�\����늄Ӡ�B(t��i)�r�����Թ��ʹ܌�ͨ�������t��Ч�·��D2��ʾ����T7��ͨ�r���Դ��늙C��늣��·�������������T7�P���r�����ͨ�^���O��D7�m(x��)��������ʹؓ�d����B�m(x��)�Ҳ���С��ͨ��L�^������ز����е�늸�L�^С��ؓ�d������ܳ��F���m(x��)��һ�㲻ϣ�����F�[3]���m(x��)����r�����Ա���ֻӑՓ����B�m(x��)����r������B�m(x��)�r�����������D3��ʾ��
���Թ����_�P�ܺͶ��O�ܵČ�ͨ��������17̎���_ͨ��B(t��i)�r����·늉�ƽ�ⷽ�̞飺
ʽ�У�Ud���Դ늉�(V)��id��늙C���(A)��L��ز���늸�(H)��R��늙Cÿ���@�M���(��)��Lc��늙Cÿ���@�M늸�(H)��M��늙Cÿ���@�M����(H)��
�O�@һ�A�������ʼֵ��I20������ʽ�ɵã�
��T7̎���P���B(t��i)�r��ͬ·��늉�ƽ�ⷽ�̞飺
�O�@һ�A�εij�ʼ�����kI20�t����ʽ�ɵã�
���·̎�ڷ�(w��n)�B(t��i)�r�����J�飺
Ҳ��T7�M��ͨ�B(t��i)�r�������ʼֵ����T7�P���A�νY���r�����ֵ�����^����T7�M����B(t��i)�r�������ʼֵ����T7��ͨ�B(t��i)�A�νY���r�����ֵ��
�����ϸ�ʽ�ɵã�
����������飺
��ռ�ձȞ�ٷ�֮50����ton=0. 5���r�������****���˕r��������Ӟ飺
��ʽ(11)��̩�ռ������ƣ��ɵã�
һ����r�£�ϡ�����şoˢֱ��늙C�@�M��Ч늸�Le-M�^С��������������^���ز����ОV��늸�L����������늙C�@�M늸е��a�䡣��ʽ(12)���Կ���������L�ļ���ʹ�û�·��늸����Ķ��p����������ӣ��@Ҳ�͜pС��늙C���D�ز��ӣ������ϵ�y(t��ng)���o�B(t��i)���ܡ�
3�Ƅ��^�̷���
ǰ������̓����ޔز����ğoˢֱ��늙C����ϵ�y(t��ng)������ó�Ҏ(gu��)�ķ����Ƅӷ������������F���ʧ�جF���п��ܓp����׃�������ԣ���ԓ��ȡ��ͬ�Ƅӷ�ʽ[4,5]��
���O�Ƅ��_ʼǰT1��T6�ɂ��_�P�܌�ͨ���Ƅ��_�Õr���F���ز����е�T7�P�࣬T8�_ͨ����׃���е��_�P���^�m(x��)����늄��\�Еr�Č�ͨ���P�����Tl��T6��Ȼ�_ͨ���@�r�����·�飺L��Tl��a��b��D7һL������pС��0֮���_ʼ�������ӣ��@�r�����·�飺L��T8�� D6��b��a_DlһL�����������������ֵ�r����������{��(ji��)�������ã�ʹT7��T8�M��PWM��B(t��i)����T7�_ͨ��T8�P���r���ز���������Boost��B(t��i)����늙C�е������������Դ���@�r�������·�飺L��D8-���Դ��D6��b��a��Dl��L������������a���ķ����Ƅ������܉�ʹ늙C�����Ƅӡ��˕r늙C̎�ڰl(f��)늠�B(t��i)��ͨ�^Dl~ D6�M��������
4�������
4.1����ģ�͵Ľ���
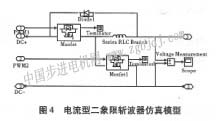
��Matlab7��O��Simulink�h(hu��n)���£�����Simunlink��SimPowerSystem�S����ģ�K���������4��ʾ������Ͷ����ޔز����ķ���ģ�͡����У�PWM1��PWM2�քe��T7��T8������̖�������_�P�ܲ���MOSFET��
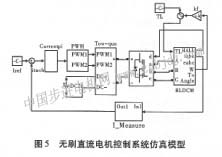
�D5�ǟoˢֱ��늙C����]�h(hu��n)����ϵ�y(t��ng)����ģ��
���У�Currentpi������h(hu��n)�{��(ji��)��������PI���ƣ�PWM��PWM�l(f��)��ģ�K�������Ǯa��T7��T8������̖��Tow_ qra������̓����ޔز�����Universal Bridge������ȫ����׃�������й�����������x��MOSFET/Diodes; BLDCM��oˢֱ��늙C���wģ�ͣ�I��Measue�������nj�����������ϳɞ龀�����TL��ؓ�d�D�ء�
�D5�oˢֱ��늙C����ϵ�y(t��ng)����ģ��
4.2����Y���c����
��ģ�����xȡ��늙C������飺�~��늉���28 V DC���~�������1.5 A��늙C�O������1������ÿ���@�M����l����늸О�0.14 mH�����О�0.05 mH���D���D�ӑT����4.045��10kg��m2��PWM�d���l�ʞ�20 kH���ز���늸�Lȡ��2 mH��
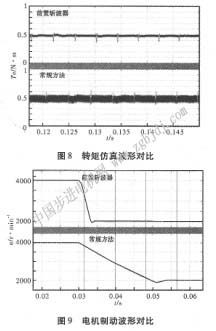
�D6���D8�քe�ǟoˢֱ��늙C�������ĸ��������D����ʹ��ǰ������������ޔز�����ʹ�ó�Ҏ(gu��)�����µČ��Ȳ��Ρ����Կ��������ڔز���늸�L�����ã�늙C�������ĸ������Լ��D�صIJ����^���ó�Ҏ(gu��)�����r���������@�pС����Ҋ����̓����ޔز�����Ч������늙C������D�ز��ӡ�
�D9��늙C�Ƅ����Ԍ��Ȳ��Ρ���0. 03 s�r��늙C�Ľo���D����4 000 r/min׃?y��u)? 000 r/min�����Կ���������ǰ������̓����ޔز�������Ч�ļӿ�늙C���Ƅ��^�̣������Ƅ����ܡ�
5�YՓ
���Ľ�B��ǰ������̓����ޔز����ğoˢֱ��늙C����ϵ�y(t��ng)���·���ɼ������^�̡����oˢֱ��늙C��������M���˶���������ͨ�^�������C���˲��������ԥ���ޔز����܉�p��������ӡ������˲�������̓����ޔز������ƕr늙C�Ƅ��^�̡�
��Matlab7.0/ Simulink�h(hu��n)���½���������̓����ޔز������oˢֱ��늙Cϵ�y(t��ng)�ķ���ģ�ͣ��o ���˷���Y����ͨ�^�c��Ҏ(gu��)�����·���Y���Č��ȣ��C����ǰ������̓����ޔز����܉����@�pС�oˢֱ��늙C������D�ز��ӣ�����Ч����� �C���Ƅ����ԣ��ӿ��Ƅ��^�̡�
|