�oˢֱ��늙C��ģ׃�Y(ji��)��(g��u)�������
�Z��ƽ1��κ����2
��1�����K��W(xu��)늚���Ϣ���̌W(xu��)Ժ���(zh��n)��212013��2���K��W(xu��)�F(xi��n)���r(n��ng)�I(y��)�b���c���g(sh��)ʡ���������������c����ң����Kʡ���c����ң��(zh��n)��212013��
ժҪ������ߟoˢֱ��늙C���Ƶ������Լ����ƓQ���D(zhu��n)�ز��ӣ���PWM - ON�{(di��o)�ƻ��A(ch��)�ϣ��Ա��C�ǓQ��������㶨�����Ŀ��(bi��o)�����Q��������D(zhu��n)�ز�������ϵ�y(t��ng)�_�ӣ��O(sh��)Ӌ�˻�ģ׃�Y(ji��)��(g��u)�����������������푑�(y��ng)���١����_�Ӳ��������ԁ����ƃ�(n��i)��ɔ_��Ӱ푣����M(j��n)�����������C�����D(zhu��n)�ز��ӜpС�����������c���������������׃�Y(ji��)��(g��u)���Ʋ��������Ժã�����Ч�pС�Q���D(zhu��n)�ز��ӣ��ǟoˢֱ��늙C������һ�N�·f�ĸ��M(j��n)���Ʒ�ʽ��
�P(gu��n)�I�~���oˢֱ��늙C�������ԣ��������ģ׃�Y(ji��)��(g��u)���Q���D(zhu��n)�ز���
�ЈD���̖��TM36 +1; TP271 +.72 �īI(xi��n)��(bi��o)־�a��A ���¾�̖��1001-6848( 2010) 02-0058-04
0�� ��
�oˢֱ��늙C��һ����׃��������ϵķǾ���ϵ�y(t��ng)������늘з���(y��ng)�ķǾ��ԡ��D(zhu��n)�ӑT����������׃���ȣ����_��(sh��)�W(xu��)ģ���y�Եõ������y(t��ng)PI�����^����ه���ƌ����ģ�ͅ���(sh��)�������Բ���H���a(ch��n)�F(xi��n)���l�����y���_(d��)��****��B(t��i)��ᘌ��@һ���}��ģ�����ơ�ģ�ͅ������m��(y��ng)����(j��ng)�W(w��ng)�j(lu��)���z���㷨�ȱ��øɟoˢֱ��늙C�Ŀ����Ը���늙C���\�����ܣ���ȡ����һ����Ч��[1��4]��
�oˢֱ��늙C�ēQ���D(zhu��n)�ز��ӣ����_(d��)ƽ��늴��D(zhu��n)�صİٷ�֮50�����������ڸ߾��ȿ��ƈ��ϵđ�(y��ng)�á��@�����}һֱ�Ǻܶ��W(xu��)���о��ğ��c���y�c���īI(xi��n)[6]�����˳��õ��ķNPWM�{(di��o)�Ʒ�ʽ���Q���D(zhu��n)�̲��ӵ�Ӱ푣�ָ������PWM-ON��ʽ�r���Q���D(zhu��n)�ز�����С��
��ģ׃�Y(ji��)��(g��u)�����nj��Ǿ��Բ��_��ϵ�y(t��ng)��һ�N��Ч�ľC�Ϸ�����ͨ�^���ГQ����(sh��)��̖�Єe��������ГQ����������׃ϵ�y(t��ng)�Y(ji��)��(g��u)��ʹ?f��n)�B(t��i)׃���\�ӵ������O(sh��)Ӌ�õĿ��g�ГQ���ϡ�׃�Y(ji��)��(g��u)���ƌ�ϵ�y(t��ng)�ą���(sh��)�z�Ӻ̓�(n��i)��ɔ_�����Էdz������ҽY(ji��)��(g��u)���Ρ�푑�(y��ng)���١����IJ���PWM-ON�{(di��o)�Ʒ�ʽ�����û�ģ׃�Y(ji��)��(g��u)������������_ͨ���M(j��n)��PWM�{(di��o)�ƣ��������ϵ�y(t��ng)�����ԣ��_(d��)���pС늙C�Q���D(zhu��n)�ز��ӵ�Ŀ�ġ�
1�oˢֱ��늙C��(sh��)�W(xu��)ģ���c�Q���^�̷���
�����������B�ӟoˢֱ��늙C������늙C�Ġ�B(t��i)���̞�
ʽ�У�Ua��Ub��Uc��ia��ib��ic�քe��a��b��c���c��������֮�g늉����������R�鶨����裻L��M�քe�鶨�����Ըкͻ��У�ea��eb��ec�鶨�Ӹ��෴늄ݣ�UN��늙C�����@�M���c���������g늉���
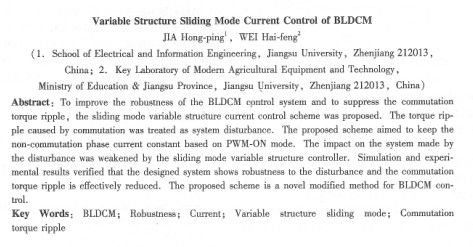
���O(sh��)늙C��A���Q����B�࣬C����ǓQ���ࡣ�ڲ�ͬ�ٶȅ^(q��)�g����늄ݡ�ĸ��늉��������֮�g���P(gu��n)ϵ��D1��ʾ�����У�Udc��ֱ��ĸ��늉���En���෴늄ݷ�ֵ���ĈD1��֪���_ͨ����P(gu��n)�������׃���ʲ��������˷ǓQ��������ӣ����ǓQ�������ӳ�˓Q�����g늴��D(zhu��n)�صĴ�С���ʱ��C�ǓQ������㶨�����ƓQ���D(zhu��n)�ز��ӵ��P(gu��n)�I[5]��
2׃�Y(ji��)��(g��u)�������O(sh��)Ӌ
����(j��)ʽ(1)���������_ͨ�����늉�ƽ�ⷽ��
2.1�����ɷ���
��ģ׃�Y(ji��)��(g��u)�������O(sh��)Ӌ˼·һ�������O(sh��)Ӌ���ГQ����(sh��)S��Ȼ�����(j��)��ģ�����ԺͿ��_(d��)�ԗl����ϵ�y(t��ng)�����\�жεĄӑB(t��i)Ʒ�|(zh��)Ҫ��ͻ�ģ�\�жεĄӡ��o�B(t��i)����Ҫ����K�@������Ļ�ģ���������oˢֱ��늙C��ģ׃�Y(ji��)��(g��u)�����У��ɶ��x�������ГQ����(sh��)
���У�i �酢�����ֵ��i��ʾ늙C�ǓQ������Ĕ�(sh��)ֵ�����ГQ����(sh��)S���r�g��(d��o)����
�Y(ji��)��늙C��(sh��)�W(xu��)ģ��ʽ(2)���ɵ������ГQ����(sh��)�ַ���
ʽ�У�u������ɺ���(sh��)��ϵ��(sh��)F��D�ɱ��_(d��)��
�xȡ�������(sh��)
�����r�g��(d��o)����
�鱣�CV <0��ͬ�rҪ��ģ����ϵ�y(t��ng)�������\���A�ξ������õĄӑB(t��i)Ʒ�|(zh��)���xȡָ��(sh��)څ���Ɂ��O(sh��)Ӌ��ģ����������������ȡ��
ʽ�У�K1��K2��������(sh��)���ɴ����������늙C�ϵ�늉�U0����ʽ(10)����ʽ(9)����
��S��(K1S+K2sign(S))��̖��ͬ����
�ɴ��C��V<0���_��ϵ�y(t��ng)��ģ�Ĵ����ԺͿ��_(d��)�ԣ��f��ϵ�y(t��ng)�܌��F(xi��n)��ģ�\�ӡ���(d��ng)ϵ�y(t��ng)��B(t��i)�\�ӵ��ГQ���ϣ����M��S=i -i=O���t�ɱ��C���H����ܸ�ۙ��o��ֵ�����⣬��ʽ(10)����ʽ(5)���ɵ��ГQ����(sh��)S���ַ���
2.2�������C��
ϵ�y(t��ng)���H�\�Еr���څ���(sh��)�z�ӡ���(n��i)��ɔ_���y���`���Լ��y�����ȶ���Ӱ��ГQ����(sh��)S��С���tʽ(5)Ҳ����׃������ʽ(5)���±�����
ʽ�У�H����N�_��֮�͡�����ʽ(9)��ͬ���xȡʽ(10)��ʾ�Ŀ����ɣ��ɵ�
 ֻҪ�M��K2>|H|��ͬ�ӿ��C��ʽ(15)��V
3�Q���D(zhu��n)�ز�������
3��1�Q�����g��늴��D(zhu��n)��
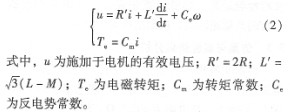
���īI(xi��n)[6]��PWM-ON�{(di��o)�Ʒ�ʽ��D2��ʾ����120�Ȍ�(d��o)ͨ�^(q��)�g��(n��i)�������ʹ�ǰ60���M(j��n)��PWM�{(di��o)�ƣ���60�Ⱥ�ͨ����ֻ���_ͨ���{(di��o)�ơ�
����A���Q����B�࣬C����ǓQ����������A�����ͨ�^�������O���m(x��)����C����ǓQ���࣬B���_ͨ���M(j��n)��PWM�{(di��o)�ơ��Q�����g�����@�M��늉�����ʽ��
ʽ�У�Ukb��B���@�M��������֮�g�Ķ�늉�����ʽ(16)��
PWM���{(di��o)���l���^�ߕr���d�������h(yu��n)С��늙C늚�r�g����(sh��)���t���Ժ���R����늄�ƽ플��Ȟ�120�ȣ��ғQ����m(x��)�r�g�̣ܶ��t�J(r��n)��Q�����g���෴늄ݶ��鳣��(sh��)����ec=-Em��ea=eb= Em��
��ʽ(16)��ʽ(17)�ɵ��������
ʽ�У�ia0��ib0��ic0��Q��ǰ������ķ�(w��n)�B(t��i)ֵ��ia0=I0��ib0=0��ic0=-I0��f��Q���r�g����ʽ(18)�ɵ�PWM-ON�{(di��o)�Ʒ�ʽ�£��Q�����g늴��D(zhu��n)�؞�
ʽ�У��Q��ǰ늴��D(zhu��n)�صķ�(w��n)�B(t��i)ֵ��  ���Q���D(zhu��n)�ز���ֵ�� 3.2�Q���D(zhu��n)�ز��ӵ�׃�Y(ji��)��(g��u)����
�ڻ�ģ׃�Y(ji��)��(g��u)�����£�Ukb��ʽ(10)�Q�����ҝM��Ukb��Udc������(j��)ʽ(20)����Udc��4Em��늙C�е����\�еēQ�����g���{(di��o)��(ji��)B��PWMռ�ձ�ʹUkb��4Em���ɾS��ƽ���D(zhu��n)�غ㶨������ʽ(18)��֪���ǓQ�������i�����鳣��(sh��)����(d��ng)Udc< 4Em��늙C�����\�Ѕ^(q��)�g���Q���r�ǓQ��������c�o��ֵ��ƫ��������ГQ����-D-1(K1S+K2sign(S))�_ʼ���ã����a���Q���D(zhu��n)�صĜpС����ʽ(10)��ʽ(13)�����x���^���K1���^С��K2��ƫ��Խ��r��|K1S|Խ��UkbԽ������Ч�ӿ��a���^�̣�ƫ��ԽС�r��Sڅ���ГQ���ٶ�Խ�����t�ܷ�ֹ�^�a��������ָ��(sh��)څ�����O(sh��)Ӌ��׃�Y(ji��)��(g��u)�������ܸ���(j��)ƫ���С�Ԅ��{(di��o)��(ji��)څ���ٶȣ������˓Q���D(zhu��n)�ز��ӣ�������Ч�pС��ģ�ГQ�r��ϵ�y(t��ng)���ӡ��Q���D(zhu��n)�ز��ӱ��|(zh��)���nj�����ϵ�y(t��ng)�ķǾ��Բ��_���_�ӣ�PI�{(di��o)��(ji��)�Ⱦ��Կ��Ʒ��������y����Ч����ģ׃�Y(ji��)��(g��u)���������������ГQ���Ƴɷ��F(xi��n)�ˌ��ɔ_���������ơ�ԓ�����o��Udc��Em�Č��r�z�y�\�㣬������ϵ�y(t��ng)�ɱ��������Єe늙C�\�еĸߵ��م^(q��)�g�����ƽY(ji��)��(g��u)���Ӻ��Ρ�
3��3�����c���Y(ji��)������
����������Ŀ��Ʋ��ԑ�(y��ng)����һ�_�oˢֱ��늙C�M(j��n)���˷����c����о���늙C����(sh��)���~��늉�UN=48 V�������R=0.3 ������늸�LһM=0.6 mH���D(zhu��n)�ӑT��J=0.0009 kg/mz���~���D(zhu��n)��nN= 400l��min��
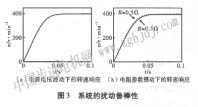
�D3(a)���Դ늉��ԡ��ٷ�֮10��ֵ�����µ�늙C�D(zhu��n)�لӑB(t��i)푑�(y��ng)���ɿ���ϵ�y(t��ng)���Դ늉�����������D(zhu��n)��׃�������@�������ɔ_�������õ����m��(y��ng)�ԡ��D3(b)���Է���늙C���H�\���У��ض���������Ķ������׃����늙C�D(zhu��n)�ٵ�Ӱ푣��ɈD��֪׃�Y(ji��)��(g��u)���ƌ�ϵ�y(t��ng)����(sh��)�z�Ӳ����У������ԏ���
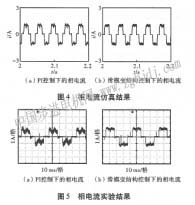
����ģ׃�Y(ji��)��(g��u)�����cPI���ƵēQ���D(zhu��n)�ز������������M(j��n)�б��^�о�������Ӌ���в�������ͬ�IJɘӕr�g�ͷ��沽�L���ĈD4�͈D5���Կ��������PI���ƣ���ģ׃�Y(ji��)��(g��u)�����µķǓQ������������@���pС������������ӽ����뷽����������Y(ji��)��һ�£������C��׃�Y(ji��)��(g��u)���ƌ��oˢֱ��늙C�Q���D(zhu��n)�ز��ӵ���Ч����������
4�Y(ji��)Փ
1)��ģ׃�Y(ji��)��(g��u)���ƿ˷��˂��y(t��ng)PI���ƌ�늙C����(sh��)���D(zhu��n)�ٺ�ؓ(f��)�d׃�����е�ȱ�c��Ӳ�����F(xi��n)���Σ�ؔϵ�y(t��ng)��(n��i)������(sh��)�z�ӡ��y���`���Լ��y�����Ⱦ��ИO���������ԣ���ģ�\�ӌ�����(sh��)�z�Ӻ���ɔ_������ȫ�İ��m��(y��ng)�ԡ�
2)����׃�Y(ji��)��(g��u)����푑�(y��ng)���١������ԏ������ԣ��ԷǓQ������c����ֵ֮�������ГQ����(sh��)��ʹ�ǓQ����������Ӹ�С���ܿ��ٸ�ۙ��o������Ч�����˓Q���D(zhu��n)�ز��ӣ�������ϵ�y(t��ng)���\�����ܡ�
3)���������׃�Y(ji��)��(g��u)����ϵ�y(t��ng)�Y(ji��)��(g��u)���Σ����ӡ��o�B(t��i)���܃�(y��u)�����m����Ҫ���^�ߵ��ŷ������ӿ��ƈ��ϡ���Փ�����������c��������ԓϵ�y(t��ng)����(n��i)��ɔ_�������õ������ԣ��Q���D(zhu��n)�ز����^С��
|