�oˢֱ��늄әC������h��ۙ���Ʒ������о�
���d�F���S־�£��O����
���m��������W���m��730050��
ժҪ��ͨ�^�oˢֱ��늄әC���Wģ�ͣ������˟oˢֱ��늄әC�a��늴��D�ز��ӵ�ԭ���ڴ˻��A�ϣ��������������h��ۙPWM���Ʒ�ʽ��pС늴��D�صIJ��ӡ����քe����Փ�ƌ��͌���C���˲���������h��ۙPWM���Ʒ�ʽ�rݔ��������θ��ӽ�����ķ���������pС�˟oˢֱ��늄әC늴��D�صIJ��ӡ�
�P�I�~���oˢֱ��늄әC��������h��ۙ���ƣ�늴��D�ز���
�ЈD���̖��TM36+l �īI��־�a��A ���¾�̖��1001-6848( 2010) 02-0051-03
0��l ��
�oˢֱ��늄әC( BLDCM)���H���Ђ��yֱ��늄әC���õĄӡ��o�B�{�����ܣ����Ҿ��нY�����Ρ��\�пɿ������ڿ��ƣ��o�Q��ȃ��c������ڬF�����I�I���еK���ˏV���đ��á�Ȼ����Ŀǰ����PWM���Ƽ��g��BLDCM����������늉�Դ�͵ġ������@��Ƈ�ݔ����������������뷽�����������늴��D�ز��Ӳ��ɿ˷���ȱ�c���������������������h��ۙPWM���Ʒ�����ͨ�^ֱ�ӿ���̴����ԜpС늄әC늴��D�صIJ��ӡ�ԓ���Ʒ��������D�ز���С���·�������F���m���ڸ����ܵ��ŷ�����ϵ�y��
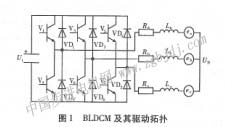
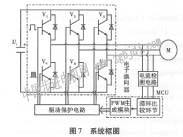
1 �oˢֱ��늄әC�Ĕ��Wģ��
�oˢֱ��늄әC�������·�ؓ�Y����D1��ʾ��
���O�����@�M��ȫ���Q����϶�ň�������ķ����������X�ۡ��Q���^�̺�늘з�����Ӱ푣���·��ͣ���Ӌ�u���ʹŜ��p�ĵ����ء��t���Խ��������B��BLDCM���Wģ����ʽ(1)��
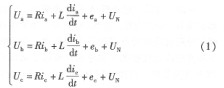
ʽ�У�Ua��Ub��Uc�������@�M��늉���ia��ib��ic�������@�M�����ea��eb��ec�������@�M��늄ӄݣ�UN�������c����늉���R��L���@�M��Ч���ֵ��늸�ֵ���t���Խ���늴��D�ط��̞飺
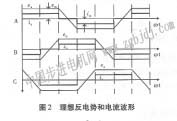
2 늴��D�ز��Ӯa����ԭ��
���ڃ�����ͨ��������B�oˢֱ��늄әC����һ�r�̿��ǃ�����ͨ����D2��ʾ���˕r��늴��D�؞飺
늄әC�D�ٷ��̞飺
��ʽ(4)��ʽ(5)����ʽ(3)�ã�
��ʽ(6)��֪��늴��D�����������������˼��O���������ķ���������t늴��D�ز��Ӟ��㡣Ȼ�����H��r�£�����늸еĴ��ڣ�ʹ�����������ͻ׃������ͨPWM�{�Ʒ�ʽ����ͨ�^�{��ݔ��PWM����ռ�ձȁ��{��ݔ��늉��Ĵ�С�����_��늄әC�{�ٵ�Ŀ�ģ��@�����Ҳ�Ͳ�һ��������ķ���������D3����ݔ����A����������Ρ�
�ɈD3��Ҋ��늄әCA����ͨ���g��������γ��F�ɂ��^���塣��ʽ(6)��֪��������F��匢����늄әC��늴��D�س��F���ӡ���ʹݔ��������νӽ�����ķ��������������������hPWM���Ʋ��ԣ�ֱ�ӌ�BLDCM������M�п��ơ�
3 ������hPWM���Ʒ����Ĵ_��
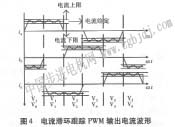
������hPWM�����ǻ��ڷ������Ƶ�˼�룬ʹ���Hݔ��������@���o���������̖����X��׃�����c��ͬ�r�����·ݔ����늉����Ξ鲻Ҏ�t��PWM�����D4��ʾ��������h��ۙPWMݔ��������Ρ�
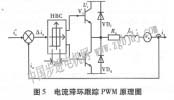
������h��ۙPWM�Ŀ��ƿ�D����D5��ʾ����늄әCA�������^��������r��������h���^�h�������z�y�������ֵ�����_�P��V��ͨ�ࣻ��늄әCA�������^��������r�������_�P��V��ͨ�࣬B��C��ͬ�����Ķ����F�oˢֱ��늄әC������h��ۙ���Ƶ�Ŀ�ģ��˕r�����@�M�����^���������X��׃����
4����z�y�·
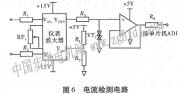
������������֪��������h��ۙ������Փͨ�^�����Hݔ�������ֵ�c�o�����ֵ�M�б��^���Ķ����Ƹ�����_�P��ͨ�����������������z�y�h���ľ��Ⱦ͛Q����ԓ�������Ŀ��ƾ��ȣ��D6��ԓ����������z�y�·��
ԓ�z�y�·ʹ�þ��܃x���Ŵ����z�y���·�д���ľ��ܺ��W���ɶ˵�늉����M�в�ַŴ�Ȼ���^һ��늉����S���������Ƭ�CAD�ڡ�����R4.R5��5v늉��։������龫�܃x���Ŵ����ą���늉������x���Ŵ���ݔ��늉�����ֵ��
5���ͽY��
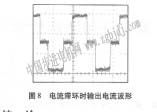
ͨ�^��������h��ۙPWM�{�Ʒ�ʽ�ķ�������֪���h����ԽС�����Hݔ���������Խ�ӽ�����ķ��������ֻҪ�m�����xȡ���h���ȣ��Ϳ��Եõ��^�����������Σ��Ķ���QBLDCM��늴��D�ز��ӵĆ��}���D7��ϵ�y��D������ϵ�y���÷�����BLDCM������ƌ����~���������~��늉�U=24 V���~������P=30 W���~���D��n=3 200 r/min;�D�ӘO����p=2�����ƺ��IJ���늙C���؆�Ƭ�C����׃�����Â��y6�_�P�ؓ�Y�����_�P��������MOSFET��
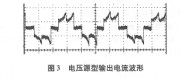
�D8��������h��ۙPWM���Ʒ�ʽ��A�����ݔ�����Ρ��ĈD�п��Կ�����A����ͨ���g�������м��������F������څ�跽���Π�@��Ҳ��������BLDCM���ڼ������������늴��D�صIJ��ӡ�
6�YՓ
����ͨ�^����������h��ۙPWM�{�Ʒ�ʽ��ʹ���^�����@�M�е�������ӽӽ�����ķ�������������˟oˢֱ��늄әC���ڼ������������늴��D�ز��ӬF�Ķ���ߟoˢֱ��늄әC�Ŀ������ܡ�
|