�őҸ��w݆�ßoˢֱ��늄әC�ɿ����о�
���|1���t��1������1���n���2
(1�������պ����W(xu��)���ϿƌW(xu��)�c���̌W(xu��)Ժ������100191��2�������պ����W(xu��)�x���ƌW(xu��)�c��늹��̌W(xu��)Ժ������100191)
ժҪ��ᘌ���őҸ��w݆( MSFW)�D(zhu��n)���ṩ���D(zhu��n)�����ğoˢֱ��늄әC(BLDCM)�M���˿ɿ��Է�����о������ȣ�������BLDCM�Ŀɿ��Դ���(li��n)ģ�ͣ����Ñ�(y��ng)������������ɿ����M�����A(y��)Ӌ��ͬ�r�����˲���������ƌ�BLDCM�ɿ��ȵ�Ӱ푣�����������һ���̶��Ͽ����J(r��n)������������L��BLD��CM��ʹ�É�������Σ�����(j��)MSFW�\�Мyԇ�Ġ�r��������BLDCM�Ĺ��Ϙ䣬�M����BLDCM�Ĺ���ģʽ�cӰ푷����������������MSFW��BLDC�ɿ��ԵĽ��h����MSFW�Ĺ��̑�(y��ng)�þ���һ���Č��Ãrֵ��
�P(gu��n)�I�~��BLDCM���ɿ��Է��������Ϙ䣻����ģʽ�cӰ푷���
�ЈD���̖��TM36 +1��TM351 �īI��(bi��o)־�a��A ���¾�̖��1001-6848(2010)02-0012-0i
0�� ��
��������őҸ��S�м��g(sh��)���M�˹��̑�(y��ng)���A�Σ����ё�(y��ng)���ں������ˑB(t��i)����ϵ�y(t��ng)�����ôőҸ��S��֧�е�b݆ϵ�y(t��ng)���ПoĦ���p�ġ��o�蝙�����o��Ⱦ�����Ӻ��\��ƽ��(w��n)����С�����S�Є��ȿ��{(di��o)���Ɍ��F(xi��n)�D(zhu��n)�ӟo���|�Ҹ��ȃ�(y��u)�c������őҸ��w݆( MSFW)�c���y(t��ng)�ęCе�w݆��ȣ����и��ߵ��ˑB(t��i)���ƾ����Լ����L�ĉ��������J(r��n)����δ���߾��Ⱥ������ˑB(t��i)���Ƶ������(zh��)�ЙC��(g��u)��
�������漰��MSFW��Ҫ��BLDCM���ṩ�DŽ������w݆�D(zhu��n)�ӡ������ϴ��S�С��S���ϴ��S�С�����λ�Ƃ��������S��λ�Ƃ������͚��w�ȽM�ɡ�BLDCM�ṩ�D(zhu��n)���\�D(zhu��n)�Ą������ҿ������w݆�D(zhu��n)�ӵ��D(zhu��n)�ٺͷ�����Ӱ�MSFW�������P(gu��n)�I�M��֮һ��
�īI[4]ָ���S�й����c�^������ռ��С�ͽ���늙C���ϵİٷ�֮97��ֱ��늙C���S�й����c�^������ռ�ٷ�֮56���ˢ����ռ�ٷ�֮42���īI[5]�J(r��n)��oˢֱ��늙C�����(q��)�ӿ��ƾ�·��������Ŀɿ��Ա����h(hu��n)��(ji��)�飺�S�С��^���@�M���(q��)�ӿ��ƾ�·��
MSFW���D(zhu��n)�Ӳ��ֿ�늴��S�Юa(ch��n)����늴����Ҹ�����Փ�ϸ���������������Ģ�p��BLDCM���D(zhu��n)�Ӳ��̶ֹ���MSFW���D(zhu��n)���ϣ����BLDCM������ĥ�p���}���@Ҳ����BLDCMʧЧ�C���c���y(t��ng)늙C�Cе�S��ĥ�pʧЧ������ʧЧģʽ���ڸ����IJ�ͬ�������ڌ�MSFW�ɿ��Ե��о��У���(y��ng)���،�BLDCM�M�пɿ��Է�����о���
1 �ɿ��Ի�������
�ɿ��ȣ��a(ch��n)Ʒ��Ҏ(gu��)���ėl����Ҏ(gu��)���ĕr�g��(n��i)�����Ҏ(gu��)�����ܵĸ��ʣ�����R(t)��ʾ��
���x���ɿ���
F(t)Ҳ�Q����ϸ��ʷֲ�����(sh��)��������(d��o)����ʧЧ�ܶȺ���(sh��)
ʧЧ�ʣ�ָ������ij�r��t�r��δ�l(f��)��ʧЧ�Įa(ch��n)Ʒ����ԓ�r��f�Ժ����һ����λ�r�g��(n��i)�l(f��)��ʧЧ�ĸ��ʣ�ӛ��A(t)��
�e�ֵã�
��(d��ng)ʧЧ��A(t)���S�r�g׃�����鳣��(sh��)A���������ֲ�����ָ��(sh��)�ֲ��r��
2 BLDCM�ɿ����A(y��)Ӌ
�����(q��)���·���A(y��)Ӌ�����Ѻܳ��죬���Ա��ĕ������]�(q��)���·�����Ʋ��ֱ����Ŀɿ��ԣ�ֻ���]������MSFW�ϵ�BLDCM�C�w�Ŀɿ��ԡ�����MSFW���D(zhu��n)�Ӳ��ֿ�늴��S�Юa(ch��n)����늴����Ҹ�������������������ĥ�p��BLDCM���D(zhu��n)�Ӳ��̶ֹ���MSFW���D(zhu��n)���ϣ������ڽM��֮�g��ĥ�p���}������BLDCM���M����żȻʧЧ�������J(r��n)��BLDCM���M��ʧЧ�ʞ鳣��(sh��)����������ָ��(sh��)�ֲ�����˱��IJ��Ñ�(y��ng)���������o��BLDCM�M���ڷ������g��ʧЧ�ʣ����ô���(li��n)ģ�ͽ���BLDCM�Ŀɿ���ģ�ͣ��M���A(y��)�yBLDCM�C�w��ʧЧ�ʡ�
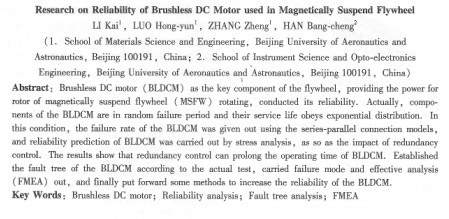
2.1 MSFW��BLDCM�Y(ji��)��(g��u)
MSFW��BLDCM�C�w���Է֞��D(zhu��n)�ӺͶ��Ӄɲ��֣���Y(ji��)��(g��u)��D��Dl��ʾ��
2��2 BLDCM�M����ʧЧ���A(y��)Ӌ
1)�����������ʧЧ��ģ�͞飺
����(j��)�O(sh��)Ӌ�����õğ�������Ҏ(gu��)��Ab�����ʧЧ�ʣ�0.045 xl0-6/h; ��E��h(hu��n)��ϵ��(sh��)����w��Sp��1 0����Q���|(zh��)��ϵ��(sh��)��A2����0.3; ��T��ض�ϵ��(sh��)��������Ԫ����Ӌ��Y(ji��)����֪���ӽM���ĜضȞ�ll0�z�϶����ң���ض�ϵ��(sh��)������T=3.1���t��p=0 042��10 -6/h��
2)������������ʧЧ��ģ�͞飺
����(j��)�O(sh��)Ӌ�����õĻ�����������Ҏ(gu��)��b�����ʧЧ�ʣ�0. 43��10-6��h����E��h(hu��n)��ϵ��(sh��)����w��Sp��0.6����Q���|(zh��)�����ӣ�0. 24����C���·��(f��)�s���ӣ�1��7TR���~��ϵ��(sh��)��l����L��������ӣ�l����S��Ҫָ���ڦ�b��(n��i)��������������Ķ������늉���(y��ng)����ģ�͵��{(di��o)��ϵ��(sh��)��S=���늉����~��늉����������O(sh��)Ӌ�в��ý��~�O(sh��)Ӌ��S=0.5���t��s=0.65���ɴ˿ɵæ�p=0 040��10-6��h
3)�@�M��ʧЧ��ģ��
�@�M��ʧЧ��Ҫ�н^���p�ġ��@�M�ྀ�������������c���_��ʧЧ��ʽ���@�M����GJB/2299C -2006����Ӳ����ɿ����A(y��)Ӌ�����փԡ��нo���ľ�Ȧ����ʧЧ��ģ�ͣ�
��b�����ʧЧ�ʣ��x���@�M���͟�ضȞ�130�棬�^���ȼ���B����������Ԫ����Ӌ��Y(ji��)����֪���ӽM���ĜضȞ�ll0�z�϶����ң���b=0.0089��10-6/h; ��E��h(hu��n)��ϵ��(sh��)����w��SF��1.0; ��Q���|(zh��)��ϵ��(sh��)��BI����0.6����K��N�ϵ��(sh��)���̶��Ϳ�׃С��Ȧ����K=1����c��Y(ji��)��(g��u)ϵ��(sh��)���Y(ji��)��(g��u)��̶�����c =1;�t�@�M����ʧЧ�ʦ�p=0.0053 x10 -6��h
4)���������Ĺ���ʧЧ��ģ�͞飺
��b =0.06 x10-6��l1����w��SF����E =1; ��Q���|(zh��)��ϵ��(sh��)���|(zh��)���ȼ�A����0. 35���t��䓦�p=0. 021 x10 -6�Sl1��
5)�B������һ�����w�����ϲ�����ʧЧ���}���_Ƭ��ճ�Y(ji��)���z��ʧЧ������Ҫ��ʧЧģʽ����ʧЧ��ģ�͞�
��b�����ʧЧ�ʣ�0.0019x10 -6��h����E��h(hu��n)��ϵ��(sh��)����w��SF����E=1����Q���|(zh��)��ϵ��(sh��)����Q=l������ճ�Y(ji��)�攵(sh��)��N= 10���t��p=0.019 x10-6��h��
���]����Ȧ���o���Y(ji��)��(g��u)����һЩ�����A(y��)Ҋ��ʧЧ���}��ȡʧЧ������ϵ��(sh��)������=0.01��10 - 6��h��
2.3 BLDCM�ɿ����A(y��)Ӌ
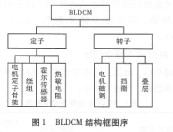
�C�����ϔ�(sh��)��(j��)���ɵ�MSFW��BLDCM�M����ʧЧ�ʔ�(sh��)��(j��)�����1��ʾ��
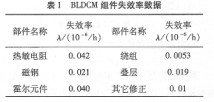
1)�ڿ����в������κ��������r�£�BLD-CM���w����M���Ĵ�(li��n)ϵ�y(t��ng)����ɿ��Կ�D��D2��ʾ��
�t����δ����BLDCM��ʧЧ�ʣ�
�˦̞�ڣ��������Ĺ���ʧЧ�ʣ�N���i�������Ă���(sh��)��BLDCMϵ�y(t��ng)�Ŀɿ��ȣ�
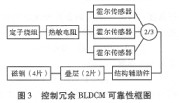
2)�ڿ����в������࣬��Ҫָͨ�^�������Ϳ����㷨���e���F(xi��n)�چ�����������������r�����܌��F(xi��n)�D(zhu��n)�ٵ����_�y���c�D(zhu��n)�ӷ�������_�z�y��ʹ֮�M��MSFW���D(zhu��n)���D(zhu��n)�پ��ȵ�Ҫ���䌍�F(xi��n)�^��ԔҊ�īI[10]�����������BLDCM�Ŀɿ��Կ�D��D3��ʾ��
�˕r��·������������(g��u)��2/3����ı�Qϵ�y(t��ng)����ɿ��Ȟ顣
��������������M���Ԟ麆�εĴ�(li��n)�P(gu��n)ϵ��BLDCMϵ�y(t��ng)�Ŀɿ��ȣ�
���x����������δ����������ɿ������L��
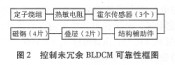
�քe��10��ĕr�g��(n��i)���ÿ��������c�����ÿ��������BLDCM�Ŀɿ����Լ�d�S�r�g��׃���L�D����D4��ʾ��
�ɈD4(a)���Կ������oՓ����������ƌ���BLDCM�����б��^�ߵĿɿ��ȣ�����0.97�����S���r�g�����ӣ�BLDCM�ɿ�����u�½���������������߿ɿ��Է��������ҲԽ��Խ��������10��Ŀɿ��ȴ�s�ஔ(d��ng)�����δ����6��Ŀɿ��ȣ���һ���̶��Ͽ����J(r��n)������������L��BLDCM��ʹ�É�����
����ͨ�^�D4(b)���Կ����ɿ�����ߵķ��ȱ��^С������ԭ��1������δ����BLDCM�Ŀɿ��ȱ����ѱ��^�ߣ������ķ��ȿ��g�^С��2����䓡��B�ӡ���������c������������ʧЧ���ஔ(d��ng)���Ƽs�˻������������������BLDCM�ɿ����е����á����BLDCM�C�w�ɿ��Եı����h(hu��n)��(ji��)�������衢��䓡��B�ӡ�������������
3 BLDCM���Ϙ��c����ģʽ�cӰ푷���
3.1 BLDCM���Ϙ�
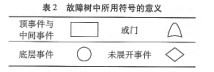
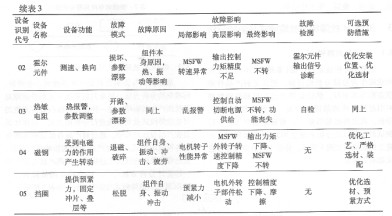
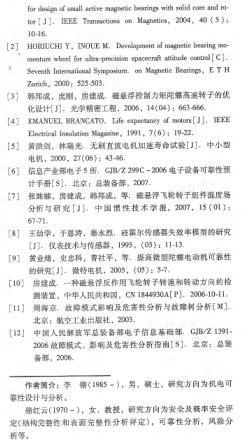
���Ϙ�������ǰѮa(ch��n)Ʒ��ϵ�y(t��ng)���ϣ���l(f��)���Ĺ���������Ϸ�����Ŀ��(bi��o)�����x���Įa(ch��n)Ʒ���Ϡ�B(t��i)�Q����¼���Ȼ���\����Փ��̖��߉���팦Bl����¼��Ĺ������ӵء�ϵ�y(t��ng)�����·ֽ⡢�������ҳ��������ء�����(j��)�őҸ��w݆�\�Мyԇ�Ġ�r�Լ�����������BLDCM�Ĺ��Ϙ䣬�������Ĺ��Ϙ���D5��ʾ�������еĹ��Ϙ��̖���x���2��ʾ��
3.2 BLDCM����ģʽ�cӰ푷���
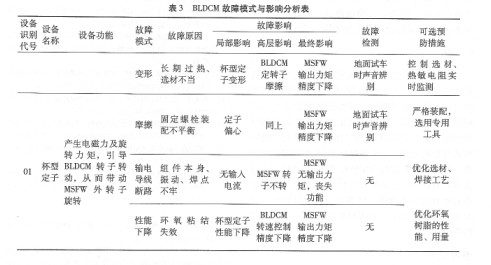
����ģʽ�cӰ푷�����һ�Nϵ�y(t��ng)�ġ�ȫ��ġ���(bi��o)��(zh��n)���ķ����������Á��Д�ϵ�y(t��ng)��Ԫ�������ό�ϵ�y(t��ng)���a(ch��n)����Ӱ푣���һ�N���O(sh��)Ӌ�A�ξ͌�ϵ�y(t��ng)�Ŀ��ܹ���ģʽ����Ӱ��M�з����ķ��������w���f���ڮa(ch��n)Ʒ�O(sh��)Ӌ�^���У�ͨ�^���a(ch��n)Ʒ���M�Ɇ�Ԫ���ڵĸ��N����ģʽ���䌦�a(ch��n)Ʒ���ܵ�Ӱ��M�з�����������ܲ�ȡ���A(y��)�����M��ʩ����߮a(ch��n)Ʒ�ɿ��Ե�һ�N�O(sh��)Ӌ�����������Y(ji��)�Ͻ����Ĺ��Ϙ䣬��BLDCM�M�й���ģʽ�cӰ푷��������3��ʾ��
3.3���BLDCM�ɿ��ԵĴ�ʩ
ͨ�^���ϵķ������Կ�������ӛ_����Ӱ�B(t��i)LDCM�M���ɿ��Ե���Ҫ���أ������ڻ���l(f��)���A�Σ�MSFW��(y��ng)�������ӷ��o�������i�o�b�Á�����MSFW݆�w���S���c�����λ�ƏĶ��p����ӡ��_�����Ɖģ��������C��ʧЧ�ʡ��ڲ������Ϸ��棬���P(gu��n)�о�����������䓵ğ�̎����ˇ�Լ��B���ɛ_Ƭ�B�ϸĞ����wʽ�Cе�ӹ�����Ч���ͽM����ʧЧ�ʡ�����ͨ�^�x�ø��|(zh��)�����������������Ĕ�(sh��)Ŀ���ƶ���(y��n)��Ĺ�ˇ�����b����Ҏ(gu��)������(y��n)��a(ch��n)Ʒ���S�h(hu��n)����(y��ng)���Y�x�yԇ�������MSFW��BLDCM�ɿ���Ҳ�кܴ�Ď�����
4�Y(ji��)Փ
�������о���MSFWĿǰ��̎�ڶ���һ���̻����P(gu��n)�I�r�ڣ���ȱ��BLDCM�L�r�g�h(yu��n)�еĿɿ���ԇ(sh��)��(j��)���ʿɿ���Ӌ��ĽY(ji��)�����r�o����ԇ��ж�������C��ͬ�r���ĸ���(j��)MSFW�\�Мyԇ�Ġ�r��������BLDCM�Ĺ��Ϙ䣬���M���˹���ģʽ�cӰ푷�������������BLDCM�ɿ��ԵĽ��h���nj�MSFW�\�Мyԇ�A��BLDCM����ģʽ�Լ���(y��ng)�����Ե�ϵ�y(t��ng)���Y(ji��)����BLDCM�Ŀɿ��Ե��������Ҫ�ą����rֵ������Ʈa(ch��n)Ʒ�Ŀɿ��Թ����кܴ�Ľ��b���x����MSFW�Ĺ��̑�(y��ng)����һ���Č��Ãrֵ��
|