�oˢֱ��늄әC�ز���ʽ�c늴��D���}���Pϵ
�R���������l������־��
(�������I��W���������7101291
ժҪ���ԓQ���^���@�M�Ľyһ�ԑB���̞���A���yһ���ƽ������_���ڔز���ʽ�µēQ���^��늴��D�أ��������˽�����ʽӰ��D���}�ӵĸ���ԭ����Փk�õ���****�Ĕز���ʽ��ͬ�r�������N�ز���ʽ�ēQ���r��늴��D�طքe�M����Ӌ����^����Y���c��Փ����һ�£������Ŀǰ���µĔز���ʽ���a���������D���}�ӵ�Ӱ��ṩ����Փ�����ͱ��_ʽӋ�㡣���ó����D���}��****�Ĕز���ʽ��PWM-ON-PWM����������λ�Â������ėl���\��λ���A�y�����F��ԇ�Y��������PWM ON PWM���D���}����С��Ŀ�]�в���ͨ�������
�P�I�~���oˢֱ��늄әC���ز���ʽ���D���}�ӣ�PWM-ON��PWM
�ЈD���̖��TM33 �īI���R�a��A ���¾d̖��1004-7018(2010)05��0012��04
0����
�������β���늄ӄݵğoˢֱ��늄әC���и߹����ܶȡ����ƺ��ε����c�����÷dz��V��.��������늴��D���}�ӆ��}�Լ��ɴ���ɵĿ������܆��}�����������ڸ߶�λ���ȡ��߷����ԵȈ��ϵđ���[1]������׃��������������ӽY�����@�M�����������B�Ӄ�����ͨ����B��ʽ��һ�����ˢPWM�{�Ʒ�ʽ�M���ٶȼ�������{�������õ�PWM�{�Ʒ�ʽ��ͬ���䌦���ܵ�Ӱ�Ҳ��ͬ��
�oˢ늄әC�D���}�ӵ����Ƽ��������ܵĸ���һֱ���о��ğ��c�����īI[11]�У����oˢֱ��늄әC���ز�����r�µ�������o���˽���Ӌ�㡣�īI[2]���N�ز���ʽ�ēQ���^��늴��D�طքe�M����Ӌ�㡣�īI[3]����������ͨ����������һ�NPWM��ON��PwM�ز���ʽ�����@�N�ز���ʽ��Ҫ6���������������īI[4��5]�����һ�N�ɱ���ߘO�ޔز��l�ʵĔز������������Խyһ�Ġ�B���̽���Ӌ����Ŀǰ���F�ĸ��N�ز���ʽ�µ��D���}�ӱ��_ʽ,�������˔ز���ʽ�c�D���}�Ӵ�С�ĸ���ϵ�������λ���A�y���o����һ�NPWM-ON��PWM�ز���ʽ�Č��F������
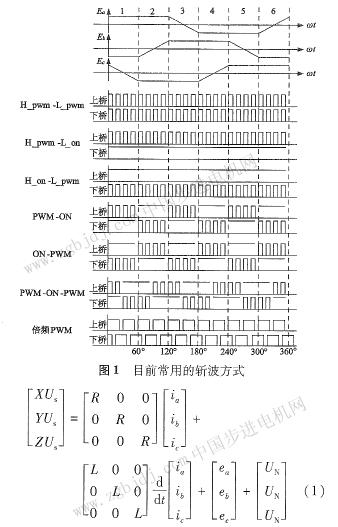
Ŀǰ��늙C����ͨ���������N�{�Ʒ�ʽ���o�ز�(���{�ƻ������{�Ʒ�ʽռ�ձȞ�1�r)��H_pwm-1һL pwm��H oD��L��pwm��H��pwm��L oil��PWM��ON��ON��PWM����������� PWM��ON��PWMi�������lPWM�{�Ʒ����ȣ����N�ز���ʽ�c��늄ӄݲ�����D1��ʾ��
1�Q���^�̽yһ늉�ƽ�ⷽ�̵Ľ�����늴��D�صĽ������_
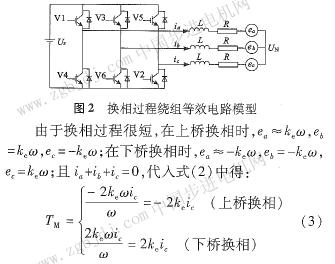
�����f�����Σ���AC��ͨ�QBc��ͨ�ēQ���^�������о�����E��Q���r��A+cһ�Q��B+Cһ����Q���r��A��c+�Q��B��c+���о����O�ėl����늙C�������Q�҅�����ȣ�늙C���������120�����η�늄ӄݣ����Դ��늙C��Ч�·��D2��ʾ���Q���^�̵���ʼ��A�������_ʼ˥�p��ͬ�rB�������_ʼ���ӣ�ֱ��4������˥�p���㣬�Q���^�̽Y�����ɴ˿�Ҋ���ړQ���^���������@�M����������ڡ���ˣ������D2���@�M��Ч�·ģ�Ϳ��Խ��������µ�늙C�����늉�ƽ�ⷽ�̣�
ʽ�У�Us��ֱ����늉���x��y��Z�քeÿ���@�M�ڲ�ͬ�ز���ʽ�µĵ�Ч늉�ϵ������ֵ���ڵ�Ч늉�����Us��ea��eb��ec�͞������@�M��늄ݣ�ia��ib,ic�������@�M�����R��L�քe��ʾÿ���@�M������늸�(늸О�ÿ���Ը��c���еIJ�ֵ)������늙C�yһ��Փ��늙C늴��D�ؿɱ�ʾ�飺
ʽ�У�TM��늙C�D�أ�Pe��늴Ź��ʣ�����늙C�Cе���l�ʣ��؞�늙C�D��늽��l�ʣ�P��O������
��ʽ(3)�ɵã�늙C�Q���^��늴��D���c�ǓQ���@�M����������ȣ���׃��څ����ͬ��
2�ɽyһ�D�ر��_ʽ�����ز���ʽ��늴��D�ص�Ӱ�
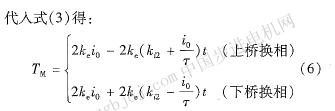
�������Ľ������_ʽ���Եó������κΔز���ʽ�£�ֻҪӋ���kilֵ���Ϳ��Խ��ƽ������Q���^�̽Y���ĕr�g��ֻҪӋ���ki2ֵ���Ϳ��Խ��ƽ�����늴��D�صĴ�С���ڲ�ͬ�Ĕز���ʽ�£�ֻҪ���^ki1�Ĵ�С���Ϳ��Ա��^�Q���^�̽Y���r�g���L�̣�ֻҪ���^ki2�Ĵ�С���Ϳ��Ա��^��ͬһ�r��늴��D��׃���Ŀ�����
���Ϙ�Q���r��x=O��y��1��z��O��y��z��D�������Ƴ���
���ԣ��ړQ���^�̣�늴��D�ؿ����½��ġ�
��ʽ(6)���Կ��������Ϙ�Q���r��ki1ԽС���Q��Y���r�gtsԽ�̣�����Q���r��ki1Խ�Q��Y���r�gtsԽ�̡����Ϙ�Q���r��ki2ԽС��늴��D���½���Խ��������Q���r��ki2Խ��늴��D���½���Խ����
��ʽ(5)�п��Կ��������Ϙ�Q���^���У�Ҫ�p�ٓQ��늴��D�ص��½�����Ҫ���������cƽ��늉�UN���pСz�����Ҫ�ڱ��ֵ�Чռ�ձȵ���r�����ӷǓQ���@�M���±۵Č�ͨ�r�g������Q���^���У�Ҫ�p�ٓQ��늴��D�ص��½�����Ҫ�pСu��������z�����Ҫ�ڱ��ֵ�Чռ�ձȵ���r�p�ٷǓQ���@�M���±۵Č�ͨ�r�g��
���·ԭ���ĽǶȁ�����������늴��D�ص��½������ڷǓQ���@�M��������½�����ġ����Ϙ�Q���^�̣�������������c����ǓQ���@�M�ģ�Ҫ����������䣬��Ҫ����UN���pСz��������Q���^�̣�������ɷǓQ���@�M���������c�ģ�Ҫ����������䣬��Ҫ�pСUN������z���c�������_ʽ�����Y����ͬ��
�ڷ����µĔز���ʽ���D���a�������㷨�r��ֻҪ��Ч��x��y��z��ֵ������Ӌ��ͱ��^�䌦�Q��늴��D���}�ӵ�Ӱ푡�
3��ͬ�ز���ʽ�µľ��w����
ҪӋ��ki1,ki2�Ĵ�С����ҪҪ�������ڲ�ͬ�ز���ʽ�µ�Ч늉�ϵ���w��y��z��ֵ����X��Y��Z��ֵ���ڲ�ͬ�ز���ʽ��ͨ�ܵ��_�P��B��ͬ������Q���r�m����·��ͬ�����S���ز���ʽ������Q���׃����ͨ�^���ز���ʽ���m����·�ķ������ɵ��ڲ�ͬ�ز���ʽ��X��Y��Z��ki2ֵ�����l��ʾ��
�ɱ�l�ɵã�PwM��ON�ز���ʽ��PwM��ON��PwM�ز���ʽ�ēQ���D���}����С���@������@�ɷN�ز���ʽ���Ϙ�Q���^�̷ǓQ���@�M���±���ȫ��ͨ�ģ�����Q���^�̷ǓQ���@�M���±��nj�ͨռ�ձ���С�ġ��cǰ�ĵķ���һ�¡�
4 PWM��ON��PWM�ز���ʽ
����������ͨ��������īI[3]�����PwM��ON��PwM�ز���ʽ�������Ϸ������Եó��YՓ��ԓ�ز���ʽ�����ēQ���D���}��Ҳ����С�ġ���ˣ��˔ز���ʽ����Ч���͟oˢֱ��늄әC���D���}�ӡ�ͬ�r��ԓ�ز���ʽ߀���ӑB�p��ƽ���طֲ��ڃɂ��_�P���ϣ�����˿ɿ��ԡ�
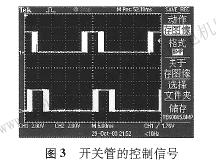
��ԓ�ز���ʽ�����_�P�ܵ�߉��Bÿ30��늽Ƕ�׃��һ�Σ������Ҫ�ʴ_���F������Ҫ6��λ�Â�������ϵ�y���s���ɱ����ӡ��������һ�N����λ���A�y�Ŀ��Ʒ�������Ч�،��F����3�������������l����PwM-ON-PwM�ز���ʽ��
�����Ʒ�����Ҫ���ڣ���ÿ�λ�����̖��B�l��׃���r�����rӛ��c��һ�λ���׃�����g���r�g���@���r�g�����D��λ��׃��60��늽Ƕȵĕr�g�����O늙C���ٶȲ�׃���t늙Cλ��׃����һ��30��늽Ƕȵĕr�g�����@���r����һ�롣��ˣ������Ʒ������@���r�g��һ����A�y��һ���_�P��߉׃���ĕr�̣���늙C�D��λ���M���A�������Ɍ��F��3�������������ėl����PwM��ON��PwM�ز���ʽ��
���\��λ���A�y���r��Ҫע�������c�����ȣ��A�y����һ��30��늽Ƕȵ����ĕr�̣�Ȼ��Ҫ�ȴ����@���r�́��R�����_�P�ܵ�߉׃�����ȴ����ܲ����\�õȴ�����팍�F����Ҫ���Д����팍�F�����ȴ���������Ĵ�����cPu��1j�g�����ҕ��������������������ɸɔ_����ԷQ�@���Д���ȴ��Дࡣ��Σ�Ҫ��һ���ij����C�ڻ�����̖��׃�ăɴ��g����60��늽Ƕȃȣ�ֻ��һ�εȴ��Д�l�������ٶ�׃�����ҕr���A�y�ĕr�g���l��һ����ƫ����ܲ����������еIJ���ͨ�������������Ӱ�늙C�������\�С��ڷ��B�\�Еr��ԓ���Ʒ������^�õ،��FPwM��ON��PwM�ز���ʽ��������TMS320�812оƬ�������\��λ���A�y���^�õ،��F��PwM ON��PwM�ز���ʽ����D3��ʾ��
5���H늙C���α��^
��һ�_�~������3 kw���~���D��8 000 r��min늙C��������ͬһؓ�d(2 N��m)��ͬһռ�ձ�(70��)����ͬ�ز���ʽ�µ����������D4��ʾ��
�ɈD4�п��Կ�������H 0n��L pwm��H pwm��L_0n��0N��PwM��PwM ON�ز���ʽ�£����ڸ��N����ͨ���������H��pwm ��pwm�ز���ʽ�´��������IJ���ͨ�������PwMһ0N��PwM�ز���ʽ�]�в���ͨ�������
PwM��ON��PwM��ON��PwM�ز���ʽ�µēQ�D11--���r�����������С�����D�ز�����С���c����ǰ�������ͬ��
6�Y�Z
�����ԓQ���^�̽yһ��B���̞���A���ƌ��ó����{�Ʒ�ʽ�Q���^��늴��D�صĽyһ���ƽ������_ʽ�������˔ز���ʽӰ��D���}�ӵĸ���ԭ�����Y���������ز���ʽӰ푓Q���^���D��늴��D�صĸ���ԭ�����������cƽ��늉��ͷǓQ���@�M�˵�ƽ��늉��IJ�ֵ���ɴ��Ƴ��˜p�ٓQ���D���}�ӵ�****�ز���ʽ��PwM��ON�ز���ʽ��PwM-ON-PwM�ز���ʽ��
PwM��ON��PwM�ز���ʽͬ�r߀����������ͨ������Ĺ��ܣ����_���F��Ҫ6��λ�Â����������Ļ���λ���A�y�����һ�N�ڲ����ӂ������ėl���£����F��PwM��ON��PwM�ز���ʽ�����o���˱����Ʒ�����ע����헣��Թ��x�߅��������ԇ������PwMһ0N��PwM��PwM��ON�ز���ʽ����Ч�p�ٓQ���r���D���}�ӣ���PwMһ0N��PwM��ͬ
�r��Ч�p�ٲ���ͨ�������
|