��C��OS-II�ڟoˢֱ��늄әC�����еđ���
�� Դ������
(�ؑc��W���ؑc400030)
ժҪ���OӋ�˻���Ƕ��ʽ���r����ϵ�yIxC��OS II�ğoˢֱ��늄әC�D������p�]�h����ϵ�y����B�˻��چ�Ƭ�CdsPIC30F6010A�Ŀ���ϵ�yӲ���Y����Ԕ���f���˦�C��OS II�΄յķ�����OӋ���̣�OS��II�����ˑ���ϵ�yܛ�����OӋ�����x�ԏ������ھS�o�͔Uչ���ܡ�
�P�I�~����C��OS-II��dsPIC30F6010A���oˢֱ��늄әC���D������p�]�h����ϵ�y
�ЈD���̖��TM33 �īI���R�a��A ���¾�̖��1004��7018(2010)05��0031��03
0����
�oˢֱ��늄әC��һ�N���ڿ����ռ���늙C��͡��������ˢ��Q����ʹ����ӓQ���c��ˢֱ��늄әC�Б�늄әC��ȣ������S�����c������õ��D���D�����ԡ����لӑB푑�����Ч�ʡ��L�������\�DԪ�����^�ߵ��D�ٷ����ȣ��V�������ڼ����������܇�����պ��졢���MƷ���t�������I�Ԅӻ��O��̓x�����ИI��
��C��OS II��һ��Դ�a���_������ֲ���ɹ̻����ɲü�����ռʽ��Ƕ��ʽ���r����ϵ�y����C��OS��II�ܹ���64���΄գ����ṩ�΄��{���c�������ȴ�������΄��gͬ���cͨ�š��r�g�������Д���յȹ��ܣ����Ј���Ч�ʸߡ�ռ�ÿ��gС�����rl���܃����ͿɔUչ�ԏ������c�����Ļ���Ƕ��ʽ���r����ϵ�y��C��OS��II�͆�Ƭ�CdsPIC30F6010A�OӋ��һ���oˢ늄әC����ϵ�y���c���y��ǰ���_����ͬ�����ڦ�C��OS��II����ϵ�y�ij����OӋ����һ����đ��ó���ֽ�ɶ����΄Ձ���ɣ��ܴܺ�̶ȵؽ��Ϳ���ϵ�y�_�l�y�ȣ��s��ܛ���_�l���ڡ�
1�oˢֱ��늄әC����ԭ��
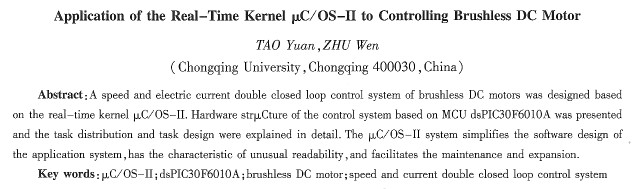
�oˢ늄әC�ēQ����ͨ�^��ӷ�ʽ���Ƶġ��D�ӵ�λ���ɶ�����Ƕ��Ļ����������z�y��ÿ���D�ӴŘO���^���������������������͕��l��һ�����ƽ����ƽ��̖����ʾ�D�ӵı��ŘO���ϴŘO�����^ԓ����������������������������̖�ĽM�ϣ����ܴ_���Q��ľ��_��o�����@�Mͨ늣����F�oˢ늄әC�����D������120��늽Ƕȟoˢֱ늄әC�Q������D�@�Mͨ���r��D1ʾ���D��ÿ�D�^60��늽Ƕȣ�����һ����������͕���׃��B�����һ���������Ҫ�Q�����Ρ������һ���Cе�D�ӣ�Ҫ�؏͵�����ڔ�ȡ�Q���D�ӴŘO������
2�oˢ늄әC����ϵ�y�OӋ
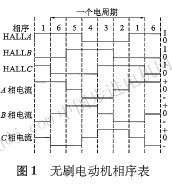
�oˢ늄әC�D������p�]�h����ϵ�y��D��D2��ʾ����h���D�٭h���ȭh������h���D�٭h��PID�\�������h�ṩ����o��������h�ٽ�PID�\�㣬����PWMռ�ձ�ݔ�����{��늙C���D����o���ٶ�׃��������h�Ĉ����l��Ҫ���D�٭h�ߡ�
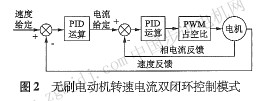
��Ӳ��ϵ�y��Ҫ����������M0sFET������׃���·���������·���z�y�·�ͱ��o�·���ɣ��D3��oˢ늄әC����ϵ�yӲ����D��dsPIc30F610A��һ��T��Ƕ��ʽ늙C���Ƒ����OӋ��Mcu������ݔ���ƽ׃��֪ͨ���_��늙C���ƌ���PwMģ�K��PwM�������_FLTA����ͬ�r�ɘ����4·��ADc�����ڵ����O��cNl3��cNl4��cNl5��ݔ���ƽ׃��֪ͨ(cN)���_����������������̖���ƽ�l��׃���r���a���ƽ׃��֪ͨ�Д࣬���oˢ늄әC������������̖��PwMlH��PwM3L�Ɍ��F6��������3�����aPwMݔ������M0sFET������׃���·�������@�M��ʩ�ӵ�늉�����׃늙C���D�١��oˢ늄әC������Q���r�̣�ֻ�Ѓ����@�Mͨ늣���ֻ��Ҫһ·����ɘ��·�����@�N����ɘӞ�ĸ������ɘӣ���Ҫ��PwM���ƽ�����c�ɘ����ֵ�����ܵõ��^�ʴ_�������ֵ���@�M��������ɘ���裬�a����늉������\�ŷŴ�һ·ݔ�뵽ADcģ�K��ݔ��ͨ��AN3���M��늙C������ɘӣ�һ·�c�O��****����M�б��^���B�ӵ�PwM�������_F��A�����F늙C���^�����o��
�����ṩ�ٶȽo������һ���λ���B�ӵ�ADc��һ��ݔ��ͨ��AN2���ɂ��_�P�Á�����늙C����ͣ�������D�������Á����Ƕ��ʽ���r����ϵ�y���΄��\�Р�B��늙C�ٶ���Ϣ�o��λ�C�@ʾ��
3���ڦ�C��0s��II��ܛ���OӋ
3��1��C��os��II��dsPIc30Fʯ010A�ϵ���ֲ
�ڦ�c��0s��II��ֲ�^���У��c���ó������P���ļ���os��cFG H��INcLuDEs��H���c̎�������P���ļ���Os_CPU H��0s_CPU��c.c��os_cPll-A��AsM��
os cFG.H�ļ��Á��_�����S��c��0s��II�ĸ��N���ܡ�
INcLuDEs��H��һ�����^�ļ������F��ÿ��c�ļ����_�^�����ё��ó�����^�ļ��������С�
os��cPU��H��������#denne���x�ġ��c̎�������P�ij��������Լ�������͡�dsPIc30F6010A�Ķї��ĵ͵�ַ��ߵ�ַ�f�������xOs_sTK_GR0wTH=O���_�P�Д����õ����N��ʽ�����xcPu��B�Ĵ����Ͷї����Ȟ�16λ��
Os_cPu_c��c�ļ���****��Ҫ�ĺ�����OsTa��skstkInit�����ڳ�ʼ���΄յė��Y����
Os_cPu_A AsM�ļ���Ҫ���Ñ������Ă��R���Z�Ժ�����()SStanH��ghRdy()��0sctxsw()��Os��Intctxsw()��OsTickISR()��()SStartHighRdy()ʹ�;w�B�΄��Ѓ��ȼ�****���΄��_ʼ�\�У�OsQxsw()�����΄ռ����ГQ��OsIntctxsw()��ISR�Ј����΄��ГQ���ܡ�()STickISR()���c��Os��II�ṩһ�������Եĕr�Դ���팍�F�r�g���ӕr�ͳ��r���ܡ������еĶ��r��l�Д���nj��F�@�����ܡ�
��ֲ������ɺ�Ҫ��C��ֲ�Ħ�c��Os��II�Ƿ������������������\�У����\�Мyԇ������ͨ�^ʾ�����^��LED�IJ��Σ��˽����ϵ�y���\����r����ֲ���a�yԇ�ɹ���һ�����΄Ռ��r����ϵ�yƽ�_�ʹ�ɹ���
3��2�΄յķ���
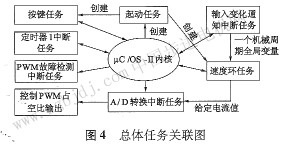
���ڦ�c��Os��II�ij����OӋ�nj�һ����đ��ó���ֳ����������Ķ����΄Ձ���ɡ���c��Os��II�Ⱥˌ��@Щ�΄��M���{�Ⱥ������oˢ늄әC�D������p�]�h����ϵ�y���w�΄��P�D��D4��ʾ��
3��3�΄յ��OӋ
(1)�����΄�
�����΄������������Є����ģ�����ϵ�y��ʼ��(������ʼ��ϵ�y�r状��r��1��PwMݔ��ģ�K��ݔ���ƽ֪ͨ(cN)���ܣ����ڣ�ADcģ�K�����I�����r��3)���������I�΄ա��D�٭h�΄պ�����h�΄գ�Ȼ���{��OsTaskDel(Os��PRIOһSELF)�M�����҄h���������΄��M��˯�ߠ�B��
(2)���r��1�Д��΄�
uc��Os-II�ĕr犹�����ͨ�^���r��1���Д����ʽ���F�ģ��Д��g����10 ms���Թ�ϵ�y̎���T���ӕr�����r���c�r�g���P���¼������Д��ӳ����У�Ҫ�{��ϵ�y����OsTimeTick����ʹ�Ñ��΄տ��ƉKOsJcB�еĕr�g�ӕr�OsTcBDly�p1�����߀Ҫͨ�^�{��ϵ�y����OsIntExit�����ص��M��;w�B��****���ȼ��΄գ�f�����ǻص����Д��˵��΄ա�
(3)ݔ��׃��֪ͨ�Д��΄�
�x������������̖��ʹ���������µă����@�Mͨ늣���ӛ�һ���Cе��������Ҫ�ĕr�g�����D�٭h�΄��е��ٶ�Ӌ���ṩ�r�g����������Д�Ҫ�浽cPu�Ĵ�������������Д�����ӳ���Ҫ�ÅR���������P��Ҫ̎�����΄գ�������c�Z�Ԍ���Ȼ���ڴ��Д�������{�á�
(4)A��D�D�Q�Д��΄�
��ADcģ�K�ij�ʼ���У��O����PwM���ƽ���c��ģ�Mݔ��ͨAN3�M��ͬ�r�ɘӡ�ͨ��늙C���Ƶ�PwM�l�ʞ�20 kHz������h�{�����ڞ�50��s���cPwM��̖ͬ���ڡ�A��D�D�Q�Д�����ӳ������Σ��������ݔ��׃��֪ͨ�Д��һ�ӣ�ֻ���^�������Ñ����a���Д���ա�������ͬ��
(5)�ٶȭh�΄�
�������ڞ�10ms����Ҫ���ܞ��xȡݔ��׃��֪ͨ�Д��΄��У��ö��r��3ӛ䛟oˢ늄әC�D��һ���Cе�������õĕr�g��Ӌ���Ԫˢ늄әC�Č��H�D�١�Ȼ���c�o���D��ֵ���^��ͨ�^PI�\�㣬Ӌ����ȭh����h�Ľo�����ֵ��ͬ�r����늙C�Č��H�D��ͨ�^���ڂ��f�o��λ�C���oˢ늄әC���ٶ�V  T��һ������ڵĕr�g��p��늙C�O���� (6)���I�΄�
���ڿ���늙C����ͣ�������D��Ĭ�J��B��ֹͣ�����D���������ڞ�100ms���������I���r���_��PwMݔ�������_���r��3��ӛ�늙C�Q���r�g������Ӌ���D�١���ֹͣ�I���r����ֹPwM������OVDcON��B�Č��Ĵ������ص���ʼ��B��
(7)PwM���ϙz�y�Д��΄�
��늙C������^��r���������^�����o���á���ֹPwM������OVDcON��B�Č��Ĵ������ص���ʼ��B��
4���F����
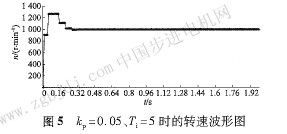
���ڌ��l�������ƣ�ֻ������D�٠��]�h�����ٶȽo��ֵ��l 000 r��min��늙C���d�ėl���£���PwMռ�ձȞ�50�����ӕr����Ƭ�C���oˢ늄әC���H�D���M�вɘӣ��ɘ����ڞ�10 ms�����Ѳɘ��ٶȂ��f�o��λ�C���״�ֻ�{���������֣�������ϵ����С׃���^��ϵ�y��������푑���ֱ���õ�푑��졢���{��С��푑�������ֹ��Ȼ��ԇ�e�ֳ������Ƚoһ���^��ֵ��������һ���{���r�@�õı���ϵ�����pС��Ȼ����u�p�ٷe�ֳ��������������@�õ�푑������Mһ���{ԇ����ϵ���ͷe�ֳ�����ֱ�������o�B�`����������õĄӑB���ܞ�ֹ���D5��kp=O.05��Ti=5�r���D�ٲ��ΈD��
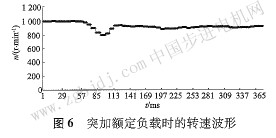
��늙C�����\�Еr����늙Cݔ���ˣ������~���d��늙C���D�ٲ��ӈD��D6��ʾ���ĈD6��֪���oϵ�yͻ���~��ؓ�d�_�ӕr���D�ٵĄӑB�ٽ���200 r��min���D���ڄӑB�������u�֏ͣ��_���µķ��Bֵ�����Bֵ������890��910 r��min֮�g��
5�Y�Z
Ƕ��ʽ���r����ϵ�y��c��Os��II���ɹ���ֲ��dsPIc30t760lOA�У�����ɟoˢ늄әC��h�D���]�h���ơ������D�ن��]�h�{ԇϵ�y����ͻ��ؓ�d�r���ӑB�ٽ��^���ܺܺõؿ���������D�صĄӑB�^�̡�uc��Os��II�����룬���Ԍ�һ�����s�đ��ó���ֽ�ɶ����������΄Ձ���ɣ����ϵ�y���_�lЧ�ʣ������_�l�y�ȣ����ڑ��ó���Ĺ��ܔUչ�;S�o�����m����څ���s�ĬF������ϵ�y��
|