�o�S�Ю���늙C����λ�õĄӑB�������
�O�Ԗ|1��������1������1������2
��1���K��W늚���Ϣ�����̌WԺ�����K悽�212013��2�|�ϴ�W늚�̌WԺ�����K�Ͼ�210098��
ժ Ҫ��ᘌ��o�S�Ю���늙C�D�ӏ�������ɶȑҸ�ϵ�y��������r�������W�j��ϵ�y�����M���˄ӑB��������о����ڽ�B�o�S�Ю���늙C����ԭ���Ļ��A�ϣ������˟o�S�Ю���늙C����Ҹ����Ĕ��Wģ�ͣ���ԓģ���M�п����Է������C��ԓϵ�y���棬�����W�j��ϵ�y������ԭ����׃��������ϵķǾ���ϵ�y���ӑB�����2��λ�ñ˴˟o��ϵľ�����ϵ�y�����������ľ�����ϵ�y�M�����]�h�OӋ���������Matlab/Simulink�����䌦ԓ����ϵ�y���˷����о�������ԇ�Y���@ʾ���W�j��ϵ�y�����ɱ��C�o�S�Ю���늙C�ڏ�������ɶ��ό��F�������ƣ����]�hϵ�y�������õĄӡ��o�B���ܡ�
�P�I�~���o�S�Ю���늙C������λ�ã��W�j�棻�������
�ЈD���̖��TP 27 �īI���R�a��A
1���� ��
���ô��S�к�늙C�Y���������ԣ��Ѵ��S���еđҸ��@�M�B�@��늙C�����@�M�ϣ�ʹ�ɷN�ň��ϳ�һ�w������ͬ�r��������늙C�D�ӵđҸ������D���o�S��늙C���ǻ����@һ�O�������ģ��o�S��늙C�ķNܶ࣬�������͡��Б��͡������͵ȣ����У��Y�����Ρ��������š��ɿ��Ըߵğo�S�Ю���늙C�����ܵ��V������ҕ��
���ڟo�S��늙C�đҸ��Ƕ������D���@�M�͑Ҹ��@�M����õĽY����늙C�Ҹ�����늴��D��֮�g���Ҹ���֮�g���������s�ķǾ�������Pϵ�����Ҫ���F늙C�����ܷ����\�в����^�ߵĿ������ܣ���회�늙C�M�зǾ��Խ���īI[5]�����D�Ӵň�������Ʋ��Ԍ��o�S�Ю���늙C�M�ж������Ҹ������о�����ȡ���˲��e��Ч���������@�N������һ�N���B������ƣ����ˌ��F�ӑB������IJ����W�j��ϵ�y���������o�S�Ю���늙C����λ��ϵ�y�M�ЄӑB������ơ�
2�o�S�Ю���늙C����Ҹ����Ĕ��Wģ��
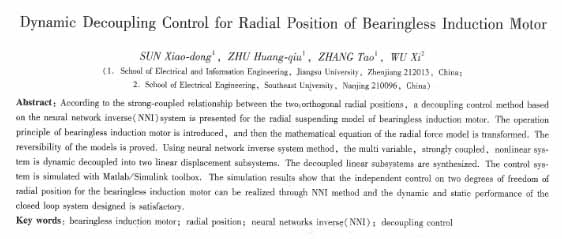
�o�S�Ю���늙C�����ЏͺϯB�@��ʬ�����O���D���@�M��P�����O�ď������@�M�������@�M�ĘO�������M�������Pϵ��P1=P2��1�����У�P1���D���@�M�ĘO������P2��Ҹ����@�M�ĘO��������P1=2�����@�MNL1��NL2�����ɣ��Á��a�����D�ň���늴����أ�P2=1�����@�MNu��Nv���ɣ��Á��a������Ҹ��������D���@�M�͑Ҹ������@�M�зքeͨ�����i1��i2���t�քe�a���ĘO��朦�1�̓ɘO��朦�2��x��y�������ഹֱ���D��λ�ÿ��������S����D1��ʾ��
�ڿ��d��r�£����D����Ҫ��z������ď��������ڏ����������@�M��ͨ����Dl��ʾ�����l2���ĈDl�ɵã������ښ�϶�҂Ȧ�1�ͦ�2ͬ�t��϶�������ӣ��ښ�϶��Ȧ�1�ͦ�2���t��϶���ܜp�٣��Ķ��a����x������ď�����Fa���ڑҸ������@�M��ͨ�뷴��������ɮa����x������ď�������ͬ������y�S����ď���������ͨ�^�ڑҸ������@�M��ͨ���cL2��ֱ������@�á�
��������㣬ͨ�^C3/2��Cr/s׃�Q�����oֹ����ϵ�µ�3���D�Q�����D����ϵ�µ�2���о����ڿ��d��r�£����D����ϵ��2���������ֱ���D���@�M�͏������@�M���ԵĻ��О�0���D���@�M�Ը�L1s�͏������@�M���Ը�L2s�鳣ֵ�������g�Ļ���M12s�c�D�ӵď���ƫ�Ƴɱ�������
ʽ�У�R��l�քe���D�Ӱ돆���D���S���L�ȣ���0��՚�Ō��ʣ�g 0���϶�L�ȣ�N1����N2�քe���D���@�M�͑Ҹ����@�M�є���
늙C��늸о��rL]�ɱ�ʾ���¡�
ʽ�Ц��ͦ·քe���D����x��y�����ϵď���ƫ�ƣ�M���D���@�M�͏������@�M�Ļ���ϵ������s��ʾ���ӂȵķ�����
���������D�Q�Pϵ���o�S��늙C����Ĵ��ܱ��_ʽ��
ʽ�У�[i]=[id1s��iq1s��id2s��iq2s]T��������id1s��iq1s�քe���D���@�M�����d��q�S�ϵķ���id2s��iq2s�鏽�����@�M�����d��q�S�ϵķ�����
��׃������ʽ(3)�ɵã�
�粻���]��ͣ�����̓λ��ԭ����늴����ɱ�ʾ��늴Ń��܌�λ�Ƶ�ƫ�������x��y����ď��������Ա�ʾ��
���⣬����늴ň���Փ����늙C�D��ƫ�ĕr���D��߀�ܵ���ƫ��λ�Ƴ����ȵ�����˹�f��������fx��fy����һ�N���е�����ͨ���Q��������������_ʽ��
ʽ�У�Ks�鏽��λ�Ƅ��ȣ�x��y�քe���D�ӏ�������ɶȵď���λ�ơ�
�����\�ӷ��̣��D�ӵď���Ҹ�������ģ�͞�
ʽ�У�m���D���|����g���������ٶȡ�
ģ�Ϳ��ԸČ��ɣ�
3����Ҹ���ģ�͵Ŀ����Է���
�xȡ��B׃����
ݔ��׃����
ݔ��׃����
��˿ɵ�ϵ�y�Ġ�B���̞�
��ģ���M�п����Է���������Ӌ��ݔ�����r�g�Č�����ֱ���������@��ݔ��׃������ʽ(9)�ã�
����det(A)=-M(id1s2+iq1s2)��m��O������ϵ�y���档ϵ�y�������A����=(��1����2)=(2��2)���Ҧ�1ʮ��2=2+2=4=n�����[���������ɵã�ʽ(8)����ϵ�y�ɱ�ʾ��
4�o�S�Ю���늙C����Ҹ������W�j��������
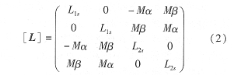
���IJ����o�B�W�j�ӷe����s-l�혋��o�S�Ю���늙C����Ҹ���ϵ�y���W�j�棬��ͨ�^�{���o�B�W�j�ę�ϵ��ʹ�W�j���F���،������ϵ�y���ܣ������W�j������ԭϵ�y֮ǰ���W�j���c�o�S�Ю���늙C����Ҹ���ϵ�y�M�ɂξ���ϵ�y����ݔ��ݔ���Pϵ�Ǿ��Եġ�����ġ��ξ���ϵ�y��Ч�ɶ���λ�ö��A�e���͵Ăξ�����ϵ�y����Y������D2��ʾ��
�ڱ��R�o�S�Ю���늙C����Ҹ���ϵ�y���W�j��ϵ�y�r�������x��������ǰ���W�j��ݔ�빝�c����6���[�����c����13��ݔ���ӹ��c����2���[����Ԫ�����ʹ��S�ͺ�����ݔ�����ɾ��о����Jֵ���������Ԫ�M�ɡ��ڴ_�����W�j��ϵ�y�ĽY����߀�茦�W�K��ϵ�y�M�ЌW����Ӗ����Ӗ���W�j��ϵ�y�Č��|��Ӗ���W�j��ϵ�y�е��o�B�W�j��ʹ�o�B�W�j�������F��Ҫ�ƽ��ķǾ����\��ʽ(Il)��һ���o�B�W�j���_����Ŀ�ģ��t���o�B�W�j�ӷe�������ɵ��W�j��ϵ�y�������ɞ鱻��ϵ�y����ϵ�y��
���ڟo�S�Ю���늙C����Ҹ���ϵ�y���f��ϵ�y�������A���=(��1����2)=(2��2)����ݔ������D����ϵ�е�������������ڎׂ�������֮�g����һ���s���Pϵ����ֻ���ڟo�S�Ю���늙C����Ҹ���ģ��ݔ��˼��S�C��̖���M���_�h�ɘ��Dz��ܵõ���Ч��Ӗ�������ġ���ˣ�����ͨ�^���o�S�Ю���늙C����Ҹ���ϵ�y�M���]�h�����������Ɓ��õ�ԭʼӖ���������ɱ��R�ķ����혋��o�S�Ю���늙C����Ҹ���ϵ�y���W�j��ϵ�y��ÿ�MӖ����������6���W�j��ݔ����̖��2��ݔ����̖id1s, iq1s�����У��W�jݔ����̖��d�S������q�S�������ڽ�������������ֱ�ӵõ�����ݔ����̖��һ�����A�����t�Dz��ø߾��Ȳ������c���㷨�x��Ӌ��õ���ϵ�y��Ӗ����
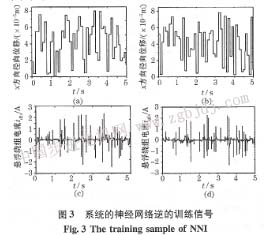
�D��λ��ݔ��o��ñֵ������0~ 0.08 mm�����B�ֲ����S�C������ʹ�ɘӔ���ͬ�r����ϵ�y푑��ĄӑB�ͷ��B��Ϣ���o����ֵ̖�ij��m�r�g������L��������ȡ�D��λ�ýo�����m�r�g��0.1 s����ʹ�o�S�Ю���늙C��ݔ����̖��������̫���׃���ʣ����S�C�a�������B�ֲ���ݔ��o��ֵͨ���Ϸքe�O����һ�����A���֞V����������ƽ��ݔ����̖����̖�IJɘӲ��Lȡ��0 001 s����ȡ��5 000�M���������е��g���س�ȡ3 000�M����W�jӖ������������2 000�M����z���������H�����У��ɘӫ@�õ�ԭʼ��������һ������������˲��Úwһ��̎�����������wһ����-1~ +1��Ӗ���ӱ������wһ��̎���������W�jӖ�����Ք����ɱ����W�j��ijһݔ�����e�`�����`����
�ٲ��Î�����헺�׃�W���ʵ��`���BP�㷨���o�B�W�j�M��Ӗ�����_���o�B�W�j��ϵ���������W�j���з����Ĺ��ܣ������䌦��δ����Ӗ���Ęӱ����е�ݔ��Ҳ�ܽo�����m��ݔ������˾��Џ������Ժ����e�ԡ�
�����W�j��ϵ�y�c�o�S�Ю���늙C����Ҹ������õ��Ăξ���ϵ�y���ٸ��Ӿ����]�h�������팦�䌍�F����Ч�Ŀ��ƣ������]�h�������ɲ���ᘌ���׃���ľ���ϵ�y��Փ�е�PID���ơ��O�c���û������ָ����n�ȿ��Ʒ����������x��PD�{����Gs(s)=1 100 +45s���鏽��λ���{������
�W�j��ϵ�y���o�B�W�j�ƽ�ʽ(11)��ϵ�y�Ǿ���ӳ�䣬4���e����������ϵ�y�ӑB���ԡ�
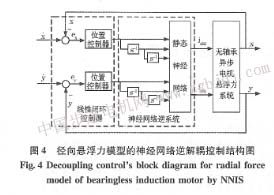
�o�S������ͬ��늙C����Ҹ���ϵ�y���W�j�������ƽY���D����D4��ʾ��
5ϵ�y����ԇ�
�Ԍ��әC���о�����ͨ�^Ӌ��C�����Mһ����C��������Ŀ��Ʋ��ԡ�ϵ�y�ą������£����ʞ�1 kW��늙C��϶��2 mm���o���Cе�S�К�϶��0 5 mm���D��늸О�16. 778��10-2 H�������D��֮�g�Ļ��О�15. 856 x10-2H�������D���@�M�͏������@�M����ϵ����78.2 H/m���D������11. 48 �����D�ӕr�g������1.46��10-2s���D���|����2. 85 kg���D�ӑT����0 007 69kg��m2���D���@�M�ļ�������2���Ҹ����@�M�ļ�������l��
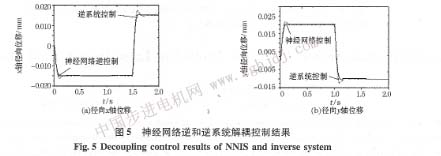
�ڷ��挍��У�����C�������᷽������Ч�ԣ�������ϵ�y������ƣ��о����W�j��ϵ�y������Ƶ����c��ϵ�y�Ľo���ڲ�ͬ�ĕr�̰l��׃����t=1.5 s�r������x�Sλ�ƽo����-0 015 mm׃����0 015 mm;t=1.0 s��������y�Sλ�ƽo����0. 020 mm׃����0010 mm����ϵ�y������ANN��ϵ�y�����������l���µČ��ȷ���푑�������D5��ʾ��
�ɈD��֪������һ��ݔ��ֻӰ�һ��ݔ�����f��ϵ�y���F�˽����Ŀ�ġ�ͬ�r������ANN��ϵ�y�����Ȳ�����ϵ�y����ϵ�y��푑����죬���{�ͷ��B�`���С��ϵ�y�������õĄ��o�B���ԡ���ˣ��W�j��ϵ�y����Ҫ������ϵ�y������
6�Y�Z
ᘌ��o�S�Ю���늙C�@����׃��������ϵķǾ���ϵ�y������˻����W�j��ϵ�y�����ğo�S�Ю���늙C����λ�ý�����ƣ��������F�˟o�S�Ю���늙C��������ɶ�λ�õĄӑB�����Ч�����˿����^�������ڏ���λ�Ƶ����ό��µ��D�ӏ�����ӣ����������ľ�����ϵ�y�M�����]�h�OӋ������ϵ�y���OӋ��Matlab7. O/Sirnulinkƽ�_���M���˷��挍�F������ԇ������ԓ������Ʋ��Ե���Ч�ԣ�ͬ�r���OӋ���]�h����ϵ�y�������õĄӡ��o�B���ԣ����Mһ���Č���о�������Ҫ����Փָ�����x��
|