�p����Б�(y��ng)늄әC(j��)SVPWMϵ�y(t��ng)���о�
�x����1������2
(1���Ϲ��I(y��)�I(y��)���g(sh��)�W(xu��)Ժ�������Lɳ410208��2���ϙC(j��)��I(y��)���g(sh��)�W(xu��)Ժ�������Lɳ410151)
ժҪ��늉�Դ����׃����늵��p����Б�(y��ng)늄әC(j��)��64��늉����gʸ�����x��d��q�ӿ��g12��****ʸ���M(j��n)�кϳɣ��õ�12�����gʸ���������@12�����gʸ������(y��u)���O(sh��)Ӌ��һ�N�����p����SVPWMϵ�y(t��ng)��ʹz1z2��o1o2 �ӿ��g�Ķ����C�����С���Ķ���Ч���ƶ��ӓp�ġ���Simulink�h(hu��n)���½���ԓϵ�y(t��ng)�ķ���ģ�ͣ�����Y(ji��)����C�˿��Ʋ��Ե���Ч�ԡ�
�P(gu��n)�I�~���p����Б�(y��ng)늄әC(j��)��늉����gʸ����SVPWM��Simulink
�ЈD���̖��TM346 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7018(2010)04��0066��04
0�� ��
�p����Б�(y��ng)늄әC(j��)�Ķ����@�M�Ƀ��ת����������@�M��(g��u)�ɣ��@�����@�M�քe�nj��Q�ֲ��ģ���λ�û���30��늚�ǣ��D(zhu��n)������\�͵ģ����Ե�Ч���c�����@�M��ͬ�ĽY(ji��)��(g��u)������ģ����D1��ʾ���о��������ڽ����{(di��o)��ϵ�y(t��ng)�У������@�N늙C(j��)������Ч�������D(zhu��n)���}�ӡ�����ȜpС늙C(j��)�ēp�ġ����늙C(j��)�ĘO��������Ŀǰ���p����Б�(y��ng)늄әC(j��)����ϵ�y(t��ng)��늄���܇�(q��)�ӡ�Ş
��������M(j��n)�����պ�����I(l��ng)����о��c���`�������ӡ�
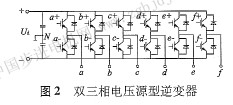
�p����Б�(y��ng)늄әC(j��)����늉�Դ����׃����늕r(��D2��ʾ)����������C���^���@�����ڶ����@�M���迹�^С����Q�@һ���}����Ч�����Dz��ÿ��gʸ���}���{(di��o)��(SVPWM)���g(sh��)�������O(sh��)Ӌ��һ�N����12���gʸ�����p����Б�(y��ng)늄әC(j��)SVPWMϵ�y(t��ng)������Simulink�h(hu��n)���½���ԓϵ�y(t��ng)�ķ���ģ�ͣ� �M(j��n)���˷��挍��о���
1�p����Б�(y��ng)늄әC(j��)��(sh��)�W(xu��)ģ��
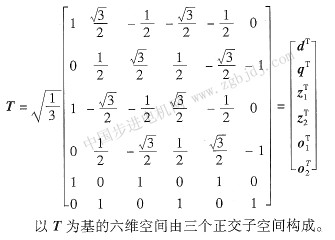
�ڝM������늙C(j��)�ٶ���ǰ���£����Ԇ�λ�E��������S���g�У��p����Б�(y��ng)늄әC(j��)�Ĕ�(sh��)�W(xu��)ģ����һ�M�Ǿ����ַ��̡���������(bi��o)׃�Q���T���Ɍ���׃�Q��һ�M�����ַ���(����T��������S���g��)����(d��ng)׃�Qǰ���ʲ�׃�r���У�
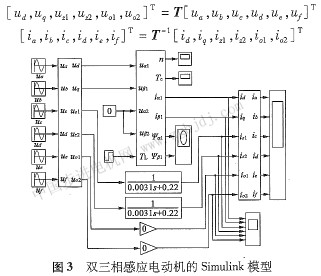
��  ���ɵĿ��g�քe�Q��d��q�ӿ��g��z 1z 2�ӿ��g��o 1o 2�ӿ��g���@�����ӿ��g�քe����늙C(j��)���H��������6k��1��6k��5��6k��3(A=0��1��2����)���C��������ֻ��һ���C������(������)�Ůa(ch��n)�����D(zhu��n)�ńӄݣ��Ķ���əC(j��)������D(zhu��n)�Q���ߴ��C���������a(ch��n)�����D(zhu��n)�ńӄݣ�ֻ�ڶ����@�M�Юa(ch��n)���C������������C���p�ġ� ����(j��)늉����̡��D(zhu��n)�ط��̡��\�ӷ��̣��ɽ����p����Б�(y��ng)늄әC(j��)��simulink����ģ�ͣ���D3��ʾ���D��u_6_6ģ�K��i_6_6ģ�K�քe���F(xi��n)����\�㣺
2�p����sVPwMϵ�y(t��ng)���O(sh��)Ӌ
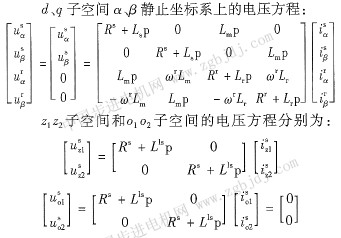
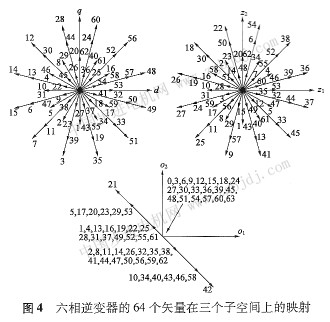
�p������׃����64�N�����_�P(gu��n)��B(t��i)����(y��ng)��64��ʸ��������׃�Q�t������׃�Q��dq,z1z2,o1o2�����ӿ��g����D4��ʾ���D�������ӿ��g������(bi��o)ϵ���̶��ڶ����ϣ�ʮ�M(j��n)�Ɣ�(sh��)������(y��ng)�Ķ��M(j��n)�Ɣ�(sh��)������׃����۵��_�P(gu��n)��B(t��i)�������顣abcdef�����ڃ��������@�M�Ǫ����ģ������60������ʸ����4����ʸ����
�ɈD4��֪�����ӿ��g��ֵ****��12��ʸ��48��56��60��28��12��14��15��7��3��35��51��49����z1z2��
o1o2�ӿ��g�Ϸ�ֵ�s��С�������z1z2��o1o2�ӿ��g���a(ch��n)����С���C����������㷨�x��d��q�ӿ��g��ֵ****��12��ʸ���M(j��n)�Ѓ�(y��u)���O(sh��)Ӌ��һ�����ʹz1z2,o1o2�ӿ��g���C�����С���Ķ���Ч���ƶ��ӓp�ģ���һ���棬****ʸ���ɫ@�øߵ�늉������ʣ����Ɍ��F(xi��n)�D(zhu��n)�غʹ�朵Ŀ��ٿ��ơ�
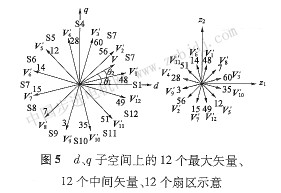
�x��12��****ʸ����������������ʸ�������Ժϳ�һ����ʸ���������Q�����gʸ������D5��ʾ������������ʸ�������Õr�g����һ�ض��������t��ʹ���gʸ����z1z2�ӿ��g��ƽ��늉����㡣Ʃ���x������ʸ��49��48��56���O(sh��)�������Õr�g��r����ʹz1z2�ӿ��g��ƽ��늉����㣬����(j��)����ƽ��ԭ�t���У�
���gʸ����λ���cʸ��48��λ����һ�µġ�
���մ˷��ɵõ�12�����gʸ�����քe��V1��V2������V12��ʾ��������ֵ��ȣ�λ�û������D5��ʾ������ϵ�y(t��ng)�ą���ʸ��V����12�����gʸ��ͨ�^���N�ٺϳɺ�õ������ٺϳ��^���У��]��Ҫ�ٿ��]�����C������Ć��}���������gʸ�����ӿ��g��ƽ��������㣬��˿�ʹ����6A��5���C������õ���Ч���ơ�
����12�����gʸ����d��g�ӿ��g���֞�12���ȅ^(q��)����ʸ��y��λ���ȅ^(q��)5�����t����������y����K�Լ���ʸ��K�ϳɡ��O(sh��)�ɘ����ڞ�t������(j��)����ƽ��ԭ�t���У�
ʽ�У��ʞ�y���cy���ĊA�ǡ�
ע�V����ʸ��49��48��56�ϳɣ�K��ʸ��48��56��60�ϳɣ��@�Ӆ���ʸ��y����K��4��ʸ��49��48��56��60�ϳɵõ���(li��n)��ʽ(2)��ʽ(3)��ʽ(5)����K�õ��������ȅ^(q��)��4������ʸ������ʸ�������Õr�g��
3�p����sVPwMϵ�y(t��ng)�ķ���
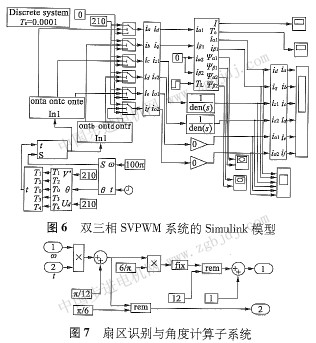
����12���gʸ�����p����sVPwMϵ�y(t��ng)�ģ�111lJlinkģ����D6��ʾ������subsystem��D7��ʾ���O(sh��)����ʸ��  ͨ�^�r�ģ�͵õ����ȅ^(q��)�Д�ķ����ǣ�   ȡ����Ȼ��ȡ12������(sh��)���1���@������ȅ^(q��)I�����c��һ��r��12���ȣ�����Ҫ��آ��12���ȣ�������ȅ^(q��)��̖��ʼ��1������ȡ����Ҫ��l���Ƕ�Ӌ��ķ����ǣ�  ȡ����(sh��)�� 늙C(j��)����(sh��)���~������5 500w���~����늉�86V���~���l��50 Hz���ŘO����(sh��)3���D(zhu��n)�ӑT��O��116 kg.m2���������O.22�����D(zhu��n)�����O.47��������늸�O��039 5 H���D(zhu��n)��늸�0.039 5 H�����D(zhu��n)�ӻ���0 036 4 H����������(sh��)����׃��ֱ����(c��)늉�Ud=210V���ɘӕr�gt=O��000l s��
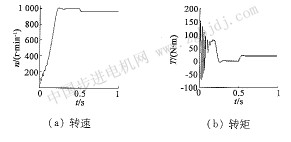
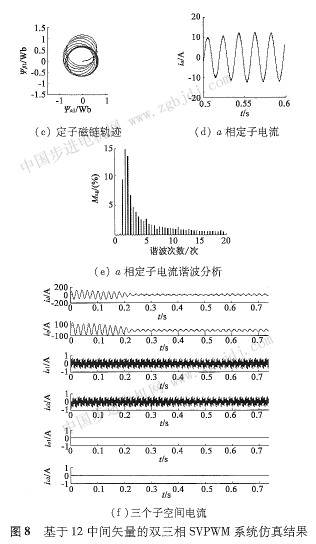
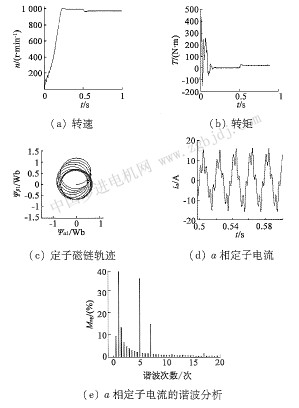
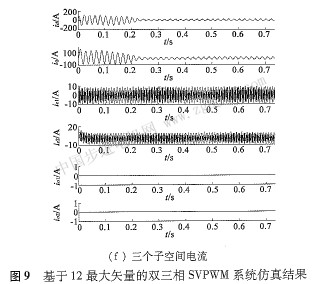
����(j��)��������(sh��)���քe������12���gʸ��������sVPwMϵ�y(t��ng)������12****ʸ��������svPwMϵ�y(t��ng)�M(j��n)�Ќ��ȷ��挍���d���ӣ�O 5 sͻ��ؓ(f��)�d20 N.m���õ����D(zhu��n)�١��D(zhu��n)�ء����Ӵ��܉�E�����ඨ����������ඨ�������FFT�����������ӿ��g�����������D8���D9��ʾ��
���ȷ����ɷNϵ�y(t��ng)�ķ���������֪���ɷNϵ�y(t��ng)��ͻ��ؓ(f��)�d�����D(zhu��n)�ٽ��䣬�@�����ɷNϵ�y(t��ng)�����_�h(hu��n)ϵ�y(t��ng)�����Ӵ��܉�E����A�Ρ����y(t��ng)ϵ�y(t��ng)�ġ�
�D(zhu��n)�����ֵ�_(d��)400N��m�����{(di��o)���^��a�ඨ����������@�C����F(xi��n)FT��������THD=39��18����z1z2�ӿ��g�����һlO A��10 A����������C������^������ϵ�y(t��ng)�����ֵ��150 N��m�����{(di��o)��С��a�ඨ��������]�����@���C����F(xi��n)FT����������THD=9.15��;z1z2�ӿ��g�������һO��8 A��0��8A����������C�������С����ˣ��O(sh��)Ӌ��ϵ�y(t��ng)�܉���Ч�pС��������C�����D(zhu��n)���}�ӡ�
4�Y(ji��)�Z
ᘌ��p����Б�(y��ng)늄әC(j��)��������C���^���D(zhu��n)���}���^��Ć��}������sVPwM���g(sh��)����׃����d��q�ӿ��g��12��****늉�ʸ���M(j��n)�о��ԽM�ϣ��õ�12�����g늉�ʸ�����ڴ˻��A(ch��)�ϣ���(y��u)���O(sh��)Ӌ�õ�һ�N�p����svPwMϵ�y(t��ng)����simulink�h(hu��n)���½�����ԓϵ�y(t��ng)�ķ���ģ�ͣ�����Y(ji��)��������ϵ�y(t��ng)�܉���Ч�pС��������C�����D(zhu��n)���}�ӣ��Ķ���C��������Ŀ��Ʋ��Ե����_�ԡ���Ч�ԡ��Դ˞���A(ch��)�����Ԍ��p����Б�(y��ng)늄әC(j��)׃�l�{(di��o)��ϵ�y(t��ng)չ�_�����˵��о���
|