|
�ƠN�� ���c�� �x���� ꐁ���(�Ϻ���ͨ��W(xu��)200030)
ժ Ҫ ͨ�^��ML4428�Ľ�B�������˷�늄ݸБ�(y��ng)���g(sh��)�ڟoˢֱ��늙C(j��)�еđ�(y��ng)�ã����o��������һЩ��Ҫ����(sh��)��Ӌ(j��)�㷽����
�� �~ �oˢֱ��늄�(d��ng)�C(j��)���Ʒ�늄ݙz�y�·
1 �� ��
��20�꣬������ӓQ��ԭ�������ğoˢֱ��늄�(d��ng)�C(j��)(BLDC motor)�õ���Խ��Խ�V���đ�(y��ng)�á����y(t��ng)BLDC���D(zhu��n)��λ�Â�����ʹ늙C(j��)�ĽY(ji��)��(g��u)׃�Ï�(f��)�s��������һЩС�ߴ�BLDC�У��������ķ��ó����O(sh��)Ӌ(j��)�е�һ��(g��)�y�}����ˣ�һ�N�Q��o�D(zhu��n)��λ�Â��������Ƶļ��g(sh��)�õ�Խ��Խ��đ�(y��ng)�á������÷�늄ݙz�y�·��ȡ����������������·�Ϳ��Ƶď�(f��)�s�ԁ�����늙C(j��)�ď�(f��)�s��[1]���S��****�댧(d��o)�w�S���_�l(f��)���˻��ڴ˼��g(sh��)�Č���IC��������Micro Linear��˾��ML4428��������B�o�D(zhu��n)�ӂ��Â������ڟoˢֱ��늙C(j��)�����еđ�(y��ng)�á�
ML4428��28�_�p��ֱ��ʽ�Y(ji��)��(g��u)����������6����ģ�K�M�ɣ�
(1) ��늄ݲɘ�����VCO��(g��u)�ɵķ�늄ݙz�yģ�K��
(2) ����(d��ng)�͓Q��߉ģ�K��
(3) MOS�ܹ����(q��)��(d��ng)ģ�K��
(4) PWM�ٶȿ���ģ�K��
(5) PWM�������ģ�K��
(6) �Դ���ϙz�yģ�K��
ML4428�ṩ���چ���(d��ng)�Ϳ��ơ������ӷ���Y���ӷ��oˢֱ��늙C(j��)�r(sh��)����Ҫ�õ������й��ܣ�����PWM��ʽ���ٶȿ��ơ��Ƅ�(d��ng)���Դ���ϙz�y�ȹ��ܡ�ML4428���C���κ��\(y��n)�Р�B(t��i)�£���Ч��(y��ng)�ܲ���(hu��)����ֱ�ӌ�(d��o)ͨ�����������ҿ���ͨ�^���þ��_���O�ܻ��(bi��o)��(zh��n)�߶��(q��)��(d��ng)�����(q��)��(d��ng)�߉�(>12V)늙C(j��)��ML4428߀�õ���һ�N���ن���(d��ng)(Smart-StartTM)���g(sh��)����ͨ�^���D(zhu��n)��λ���M(j��n)�вɘӣ�����(j��)�ɘ���̖���(q��)��(d��ng)늙C(j��)��ʹ늙C(j��)һֱ���ٵ��~���D(zhu��n)�١��@�Ӳ��H�ܱ��C�چ���(d��ng)�r(sh��)늙C(j��)����(hu��)���D(zhu��n)������߀�ܿs�̆���(d��ng)�r(sh��)�g��
2��늄ݙz�y�͓Q����
��(d��ng)���şoˢ늙C(j��)�\(y��n)�D(zhu��n)�r(sh��)�������@�M�ķ�늄�(d��ng)���c�D(zhu��n)��λ���������P(gu��n)�����ڸ����@�M�ǽ��挧(d��o)ͨ�����ģ���ij���@�M����(d��o)ͨ�ĕr(sh��)�̣��䷴늄ݲ��ε�ijЩ�����c(di��n)���ɴ����D(zhu��n)��λ�Â������Ĺ��ܣ��õ���Ҫ�ēQ����Ϣ��
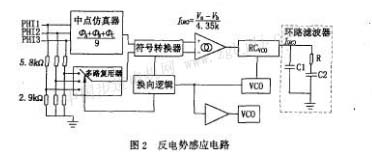
�D2�o���˷�늄ݸБ�(y��ng)�·��ԭ�������c(di��n)������ݔ����������c(di��n)�λ����·��(f��)��������(j��)�Q��߉�x��ݔ��δͨ��ࣨ�z�y�ࣩ�ĸБ�(y��ng)늄�ݔ��(PHI)����(j��ng)��̖�D(zhu��n)�Q���͵õ��˙z�y��ĸБ�(y��ng)늄�ֵ��
���c(di��n)����������·��(f��)����������(d��o)�Ŵ����ͷ�̖�D(zhu��n)�Q���ஔ(d��ng)��һ��(g��)��λ̽�y�������c�h(hu��n)·�V�����Լ�������ʎ��(VC0)����(g��u)���˷�늄��i��h(hu��n)���i��h(hu��n)��VCO�i����늙C(j��)�ķ�늄ݣ�VCO��(zh��n)�_��ݔ��늙C(j��)�ēQ���l�ʡ��\(y��n)���i��h(hu��n)���g(sh��)��ͨ�^�y��늙C(j��)�@�M�ĸБ�(y��ng)��늄݁��_�����_�ēQ�����ֻҪ늙C(j��)���\(y��n)���^���У�늙C(j��)�Ը�ϵ��(sh��)�IJ���(d��ng)>�ٷ�֮30������늙C(j��)��PWM���ķ���(y��ng)�����У��Ϳ����\(y��n)���@�N��늄ݸБ�(y��ng)���g(sh��)��(sh��)�F(xi��n)����늙C(j��)�����_�Q����
�ڷ�늄ݙz�y�·�У�ͨ�^����ͨ���IJɘӁ�Q��������߀�ǜpС�Q���l�ʡ���Q���^�����`�߷Ŵ�������RCvco�ϵĞV����RC��늣�����(d��ng)�Q���^���r(sh��)���͕�(hu��)����VCO��ݔ�룬ʹVCO��ݔ���l�����ߣ��Ķ��ӿ�Q��������RCvco������ģ�M�ٶȿ��ƭh(hu��n)���ٶȷ���늉���
��늄ݲɘ�ݔ��PHI��GND��ݔ������s����8. 7k�����(q��)��(d��ng)�߉�늙C(j��)�r(sh��)��PHIݔ�����c��贮(li��n)���Ա��C�κ�PHIݔ���****늉�����(hu��)���^3 V������λ�z�y������(sh��)��Ӌ(j��)��[3]
VCO���O(sh��)����횱��C����****�l�����\(y��n)�Еr(sh��)��VCO�Ŀ���늉�����(hu��)���^yREF����****�l�ʞ飺
ʽ�Т���늙C(j��)�O��(sh��)��RPMMAX��늙C(j��)ÿ���****�D(zhu��n)��(sh��)��VCO�������Сֵ�飺
�D3�o���ˎ���λ�z�y�����i��h(hu��n)�ľ��Ԃ��f����(sh��)����λ�z�y��������飺
�����h(hu��n)·�V�������迹�飺
��Ҫ��h(hu��n)·��20��(g��)�i��h(hu��n)ѭ�h(hu��n)��ͣ�����tҪ�M��
��RCvco���_���ؽ�һ��(g��)80k����裬��ʹ늙C(j��)�əz�y��B(t��i)���]�h(hu��n)�\(y��n)�Р�B(t��i)ƽ���D(zhu��n)�Q��
4 늙C(j��)�Ć���(d��ng)���ٶȿ���
��(d��ng)늙C(j��)ͣ�D(zhu��n)�r(sh��)�������a(ch��n)����늄ݡ���?y��n)��]�h(hu��n)�Q����Ҫ�õ���늄���̖������늙C(j��)�����������ʽ����(d��ng)��ֱ��������ķ�늄ݮa(ch��n)������(d��ng)RCvco��늉����^0.6V��늙C(j��)���M(j��n)���\(y��n)�Р�B(t��i)���@�r(sh��)늙C(j��)�D(zhu��n)�ٴ�s�鷴늄ݸБ�(y��ng)���g(sh��)�ڟoˢֱ��늙C(j��)�����еđ�(y��ng)�õİٷ�֮8�����ܮa(ch��n)������ķ�늄݆���(d��ng)�]�h(hu��n)�\(y��n)�С�
ֻҪRCvco�ϵ�늉�����VSPEED��늉��r(sh��)��늙C(j��)�ͱ����ڼ��٠�B(t��i)�����@�Εr(sh��)�g��(n��i)��������/LIMIT�����⣬늙C(j��)���õ�****늉���N�ӵ��(q��)��(d��ng)����(d��ng)RCvco늉��_(d��)��y(t��ng)SPEED늉��r(sh��)�����Cisc����늣���ͨ�^�O(sh��)��һ��(g��)25kHz��PWM��X���ı��^����(zh��n)��N�ӵ��T�M(j��n)�п��ơ��ٶȭh(hu��n)���a(b��)����gm =0. 23mH�Ļ���(d��o)�Ŵ�����ݔ��Csc��Clsc����ɡ��D4��B
ML4428�ٶȿ��Ƶ�ԭ�����ɂ�(g��)����(d��o)�Ŵ�����ݔ�����ٶȿ����У�������������Ď�����Cisc�O(sh��)����
�V�����Ď�����(y��ng)��RCvco���_��λ�ÞV���������İٶ�֮10���ң�ͨ����1��10�ķ�����(n��i)��
5�Y(ji��)�Z
����ML4428����(sh��)�F(xi��n)��һ��(g��)�Pʽ����ֱ���oˢ늙C(j��)�ēQ�����ƺ��ٶȿ��ơ��Y(ji��)�����������÷�늄ݸБ�(y��ng)���g(sh��)��ʹ늙C(j��)���w�ĽY(ji��)��(g��u)�������@�f������늄ݸБ�(y��ng)���g(sh��)�ڟoˢֱ��늄�(d��ng)�C(j��)�Ŀ��Ʒ����б��^��đ�(y��ng)�Ãr(ji��)ֵ��
|