|
�R���� ���l(w��i)�� ��������������I(y��)��W(xu��)����710072��
ժ Ҫ ��B��һ�N���Ό�(sh��)�õĻ�ģ׃�Y(ji��)��(g��u)���Ƽ��g(sh��)���o����ϵ�y(t��ng)ֱ��λ���]�h(hu��n)���ƽY(ji��)��(g��u)��D�����h(hu��n)��(ji��)�Ă��f
����(sh��)��Ӳ����(sh��)�F(xi��n)�·��
�� �~ ����늙C(j��)�oˢֱ��늄әC(j��)�ŷ�����
l �� ��
ϡ�����şoˢֱ��늄әC(j��)��ϡ������ͬ��늙C(j��)����׃���������D(zhu��n)��λ�Ùz�y����(g��u)�ɣ��������w�eС�������p��Ч�ʸߡ��T��С��푑�(y��ng)������c(di��n)��ͬ�r߀���������ֱ��늄әC(j��)��(y��u)���Ŀ������ԡ������@�N늙C(j��)������ӓQ���������˙C(j��)е�Q���b�ã�����˷����ˢ�͓Q������������һϵ��ȱ�c(di��n)��������늴Ÿɔ_���Q����ˢĥ�p�Ϳɿ��Բ�ȡ������꣬�S��ϡ�����Ų��Ϻ��������������܃r��ȵIJ�
����ߣ�ϡ�����şoˢֱ��늄әC(j��)������С���ʸ������{(di��o)��늙C(j��)��܊�����ŷ�����늙C(j��)��(y��ng)��Խ��Խ�V����������ȡ����ֱͨ����ˢ�ŷ�늄әC(j��)��څ�ݡ���ˣ�����ᘌ�ijֱ���ŷ�����ϵ�y(t��ng)������ϡ�����şoˢֱ��늄әC(j��)����B��һ�N���Ό�(sh��)�õĻ�ģ׃�Y(ji��)��(g��u)���Ƽ��g(sh��)�����нo����ϵ�y(t��ng)ֱ��λ���]�h(hu��n)���ƽY(ji��)��(g��u)��D����B��ϵ�y(t��ng)���Ʒ������o���˸��h(hu��n)��(ji��)�Ă��f����(sh��)��Ӳ����(sh��)�F(xi��n)�·��
2 ϵ�y(t��ng)����ԭ��
2.1ϵ�y(t��ng)��(g��u)��
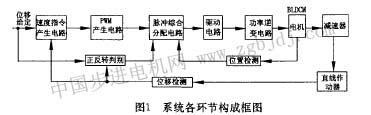
��ϵ�y(t��ng)�����h(hu��n)��(ji��)��(g��u)����D1��ʾ������늙C(j��)���w��һ�_����ϡ������ͬ��늄әC(j��)�����Ӳ��������@�M���䷴늄ݾ������β����D(zhu��n)�ӄ�Ų����S�F��
(NdFeB)ϡ�����Ų��ϣ����D(zhu��n)��һ��(c��)�˲��X�P��Ƕ�Ѓɂ�1806����Ƭ��䓣������X�P�c���ň����_.
�����Ŀ�������A(y��)���Ŀ�Y�����c�D(zhu��n)�ӱ��w�̶���һ�w�������D(zhu��n)��λ�õ����дň����D(zhu��n)��λ�Â�����������������ʽ�����_�P(gu��n)�z�y����UGN3119U����(d��ng)�D(zhu��n)�����D(zhu��n)һ�ܕr������������ݔ�����1206��ռ�ձȞ�o��5�������}�_A��B��C��늙C(j��)�D(zhu��n)���S��(j��ng)�༉�X݆�p�����(q��)��ֱ����������݆�U�C(j��)��(g��u)����ֱ��λ�ƙz�y���þ��ܻ���׃������׃���������c(di��n)�ӵأ��ɶ˽�ʿ5V��(w��n)��ֱ���Դ���Ƅ��|�^���U���ӣ��Ķ�ʹ�|�^�Ͽ�ݔ��������λ������늉���̖������ϵ�y(t��ng)λ�Ʒ�����늙C(j��)������׃�·����������ʽ��׃��������ֱ��48V��(j��ng)�V����ݹ�늣���6�������_�P(gu��n)���ø��lMOSFET����IRF530����׃��ֱ����·�����(j��ng)��������LEMģ�KLA-25NP�팍(sh��)�F(xi��n)����z�y��������������^�����o(h��)��������׃���_�P(gu��n)��������6·����оƬIR2130���(q��)�ӣ�PWM�a(ch��n)���·���ÆΘO�Զ��l�{(di��o)�������·SG3525����ݔ���}�_���������ڼ���늙C(j��)�����@�M�ϵ�늉�ƽ��ֵ�����ɴˁ팍(sh��)�F(xi��n)�����{(di��o)���{(di��o)�ٿ��ơ�늙C(j��)�����D(zhu��n)����ͨ�^�o��λ�ƅ���늉��ͷ���ֵ���^����ɣ��C���·��һƬGAL16V8�������_�P(gu��n)�����ŘO����߉̎���͓Q����̖���}�_���䣬���ٶ�ָ��a(ch��n)���·���ɻ�ģ׃�Y(ji��)��(g��u)�������팍(sh��)�F(xi��n)��
 2.2ϵ�y(t��ng)����ԭ��
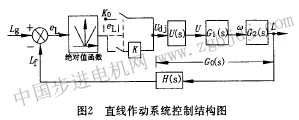
����C(j��)�һ�w���ğoˢֱ��늄әC(j��)��λ���]�h(hu��n)����һ����ɫ������늙C(j��)��(sh��)�F(xi��n)����ӓQ���ǰ�ᣬ���Ա�ֱ������ϵ�y(t��ng)�Ŀ�����Ҫ���F(xi��n)��ֱ��λ�Ƶ��]�h(hu��n)���ƣ���D2��ʾ��P(S)��PWM���ʷŴ��·��������(j��)�D(zhu��n)���{(di��o)��(ji��)ָ��Uaj�a(ch��n)��PWM�}�_���Ķ���늙C(j��)ʩ��һ���������ٶ�ָ���늉��{(di��o)��(ji��)ֵ����һ�������Ŵ�ϵ��(sh��)Ki����Gi (S)�ǟoˢֱ���ŷ�늙C(j��)�Ă��f����(sh��)����һ��ʽ�ǣ�
һ��C(j��)늕r�g����(sh��)ȡ�Q��늙C(j��)늅���(sh��)���D(zhu��n)�ӑT������TD>Tl����(d��ng)����늴ŕr�g����(sh��)�r��늙C(j��)���f����(sh��)�ɽ��ƞ�T�ԭh(hu��n)��(ji��)��
G2 (S)��ֱ���������͜p�������f����(sh��)������ݔ����늙C(j��)�ٶȣ�ݔ����λ�ƣ�����ʽ�飺
H (S)��λ���������h(hu��n)��(ji��)��һ����һ�������h(hu��n)��(ji��)����H(S)=K3��ϵ�y(t��ng)�V�x�����Go(S)һP(S)��Gi(S)��G2(S)����
�������ϵ�y(t��ng)����푑�(y��ng)�ԣ���ϵ�y(t��ng)����׃�Y(ji��)��(g��u)���ƣ�����������һ�������c��ֵ�ГQ�ĺ��λ�ģ׃�Y(ji��)��(g��u)���ơ���λ���`����eL��o��ֵL���c����ֵL֮���eL��(j��ng)�D2��****ֵ����(sh��)��ϵ�y(t��ng)�鳣ֵK�����ƣ��@�rPWMռ�ձȞ�1��늙C(j��)��ȫ��ݔ�룬�����\(y��n)�У���ʹleLIѸ�ٜpС��늙C(j��)���ñ����{(di��o)��(ji��)��PWMռ�ձȳɱ���K�pС��늙C(j��)��늉����D(zhu��n)��Ҳ�ɱ����pС��������늙C(j��)�o���{(di��o)�رƽ�k I=o���@��ȡ�`����****ֵ����?y��n)�ϵ�y(t��ng)���O(sh��)�������D(zhu��n)�Єe�·��һ�������D(zhu��n)�_���Ժ�늙C(j��)�{(di��o)��(ji��)�H��ز��{(di��o)�٣��ٶ��{(di��o)��(ji��)ָ��ֻ���`���С���P(gu��n)���c����ؓ(f��)�o�P(gu��n)������ϵ�y(t��ng)����(j��)eL��̎��ͬ�������ò�ͬ���ƽY(ji��)��(g��u)������ֻҪ�x����m�ą���(sh��)Ko��K��K1��K2��K3��KDֵ�ͿɌ�(sh��)�F(xi��n)��ģ׃�Y(ji��)��(g��u)���ƣ��Ķ��a(ch��n)����ͬ���ٶ��{(di��o)��(ji��)ָ��Udj��
3 ϵ�y(t��ng)���h(hu��n)��(ji��)�·��(sh��)�F(xi��n)
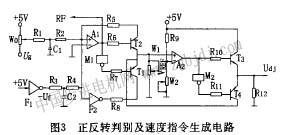
3.1 늙C(j��)�����D(zhu��n)�Єe���ٶ�ָ�������·
��ֱͨ��늄әC(j��)�����D(zhu��n)������������׃���Ӷ�늉��ĘO�ԁ팍(sh��)�F(xi��n)�����oˢֱ��늄әC(j��)�t������׃�Q��������׃�����D(zhu��n)��˱��IJ��ÈD3�·�팍(sh��)�F(xi��n)�����D(zhu��n)���ƺ��ٶ�ָ�����ɣ���(d��ng)λ���O(sh��)��ֵ���ڷ���ֵ�r��eL>O�����^��Aiݔ������ƽ��늙C(j��)��(y��ng)���D(zhu��n)���@�r�C���·GAL16V8���������λ�Â�����ݔ����̖�M(j��n)��̎������������߉�P(gu��n)ϵ���Ⱥ����ѭ�h(hu��n)�Q�ࡣ
ABһAC��BC��BAһCAһCB
�@6���Q��߉��̖��(j��ng)�(q��)���·���քe���䵽������ʽ��׃��6�������_�P(gu��n)�����ĖŘOSl��S6���ͿɌ�(sh��)�F(xi��n)늙C(j��)���D(zhu��n)����֮eL
�D3��F1��F2����LM358��(g��u)�ɵĆ��Դ��������M1��M2����T��Ai��A2��LM311��(g��u)�ɵĆ��Դ���^����T1��T4�����O��9013��RF�������D(zhu��n)��̖ݔ��(RF=1�����D(zhu��n)��RF=O�鷴�D(zhu��n))��Uaj��ݔ�����ٶ�ָ��·�ڹ����r��Al��ͬ���B�c(di��n)늉���UB=Ug �������`��eL����UB>O��늙C(j��)���D(zhu��n)��RF����ƽ��Tz��(d��o)ͨ��Ti�dֹ��C�c(di��n)�λ��KUB����֮RF����ƽ��Tz��ֹ��Ti��(d��o)ͨ��C�c(di��n)�λ��K IUB I���Ķ���(sh��)�F(xi��n)���`���****ֵ����(sh��)������K���λ��Wl�{(di��o)��(ji��)��늙C(j��)���`��ɱ����p�١��{(di��o)��(ji��)�λ��Wo�����������Ɍ�(sh��)�F(xi��n)����ֱ��λ�Ƹ�ۙ��
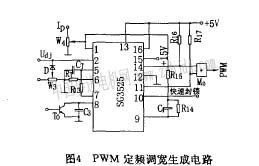
3.2 PWM�����·
PWM�����·����SG3525оƬ������·��D4��ʾ��ԓ�·��(n��i)���Ԏ���ʎ������ʎ�l�ʛQ����CT��Rr����(d��ng)���CT�����Rr�̶��Ժ���ݔ��PWM�鶨�l��̖��оƬ1��2���_���(n��i)���`��Ŵ����ķ����ͬ��ˣ�PWM��ռ�ձ�ȡ�Q��1��2�ɶ˵��λ�����SG3525�鶨�l�{(di��o)��PWM�����·���������^(q��)�O(sh��)����7�_���R13�Q������8�_���Cs���ڌ�(sh��)�F(xi��n)ܛ���ӣ�SG3525��15�_��оƬ��+15V�Դ��16�_�酢��늉���13�_��ݔ��PWM���ƽ늉���14�_��11�_������180����ռ�ձ�С��o��5��PWM��̖��R16Rn��������衣���˔U(ku��)��PWMռ�ձ��{(di��o)��(ji��)�������ݔ����(j��ng)һ���TMo�Ϟ�һ�NPWM���@��ռ�ձȿ��_(d��)0��0. 98����PWM��̖��GAL16V8���c�Q��߉�քe���c�����ɵõ��C�ϵĔز�������̖��
ԓ�·�O(sh��)������������ƣ�һ��������^ijֵ���������^�����o(h��)ֵ����SG3525��1�_��IP����ƽʹ�λ̧�ߣ��@��1��2���_�λ��ֵ�pС��PWMռ�ձȕ��Ԅӽ��ͣ��_(d��)��������Ŀ�ġ��������·ʧЧ���a(ch��n)���^�����t�^���·���l(f��)��һ��̖����10�_��SG3525�����ٷ��iPWMݔ������(sh��)�F(xi��n)�^�����o(h��)��
 ���]���oˢֱ��늙C(j��)�o���ʵ����ƣ�һ��늙C(j��)�D(zhu��n)�ٲ�������ijһ****�D(zhu��n)����߀����ؓ(f��)�d�����Ԯ�(d��ng)eL
4�Y(ji��)�Z
���IJ���ȫӲ����(sh��)�F(xi��n)��ϡ�����şoˢֱ��늄әC(j��)ֱ������ϵ�y(t��ng)λ���]�h(hu��n)���ƣ��䌍(sh��)�r�Ժá��·���Ρ������{(di��o)ԇ���̌�(sh��)�F(xi��n)�����ڿ����������˻���׃�Y(ji��)��(g��u)���ƣ�ϵ�y(t��ng)����푑�(y��ng)�����ߣ�ͬ�r�������o���{(di��o)�Ϳ�ؓ(f��)�d�_�ӣ�����ģ׃�Y(ji��)��(g��u)���ƴ�����ģ�B(t��i)���ӣ�����ϵ�y(t��ng)�o����ܞ��㣬�����õ��ل����\(y��n)�D(zhu��n)�ƽ���Ч���^�����룬���Ա�ϵ�y(t��ng)�^���m��(y��ng)܊����ֱ������ϵ�y(t��ng)��(qi��ng)�{(di��o)����푑�(y��ng)��Ҫ�����⣬��ϵ�y(t��ng)�O(sh��)�ж̕rܛ���ӡ���������ƺ��^�����o(h��)�ȹ��ܣ��ɴ_��ϵ�y(t��ng)��ȫ�\(y��n)�С�
�R���䣺�У�1963��10�³����������ڣ���Ҫ����늙C(j��)���ƵĿ����c�̌W(xu��)������
|