|
ͯ���� ���㽭ʡ�C��OӋ�о�Ժ��
���ƽ ���F�ţ������I���I��W��
��ժ Ҫ�����Ľ����˷����ӟoˢֱ��늄�軵Ĕ��Wģ�ͣ�������������ģ�ͣ�������һ���������;���FORTRAN�Z�Գ�����Ӌ��C��늙C�\�Еr��늘������늴����ؼ��D���M�Д�ֵӋ�㡣��ͨ�^Ӌ�㣬������늘��@�M늸еĴ�С��늘������늴����ص�Ӱ푡�
���� �~���oˢ늙C��ֱ��늄әC��ģ�ͣ����棬��������
O �� ��
�oˢֱ��늄әC��һ�N��ӓQ�������ֱ��늄әC�����ӷ�ʽ���oˢֱ��늄әC�ɷ֞����Ҳ��Ӻͷ����ӃɷN������͡����ڷ����ӟoˢֱ��늄әC�����Ҳ��ӟoˢֱ��늄әC��Ⱦ��п��ƾ�·���Ρ��ɱ��͵ȃ��c����ˏV���������ŷ�ϵ�y�С����Ƿ����ӟoˢֱ��늄әC�����ز����^�����ز���Ӱ�ϵ�y�Ķ�λ���ȡ���ˣ��б�Ҫ��늙C�\�Еr��늴����ؼ��c֮���P�ĸ����M���^�龫�_��Ӌ��ͷ������������Ƚ��������ӟoˢֱ��늄әC�Ĕ��Wģ�ͣ��Գ��õĶ�����ͨ�������Θ�ʽ�oˢֱ��늄әC��������늙C�h�Еr��늘������늴����ؼ��D���M�з���Ӌ�㡣��ͨ�^Ӌ�����늘��@�M늸д�С��늘������˲�r���ص�Ӱ푡�
1���Wģ��
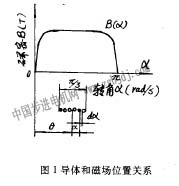
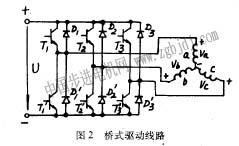
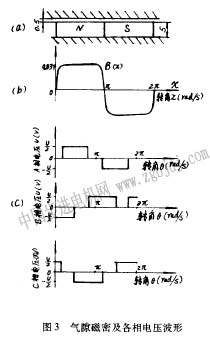
�����ӟoˢֱ��늄әC�D�������ŽY����1������늘С����������@�M�ڿ��g�ϻ���120�ȣ��t�����@�M���·���̞�
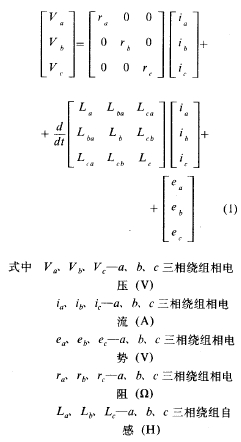
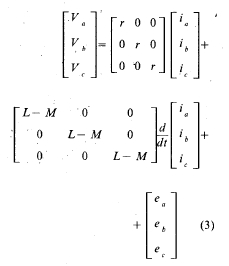
��������ʽ
���������@�M���Q�ֲ�������
�tʽ(1)׃��
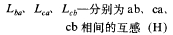
�������(2)��
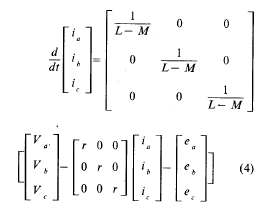
늴��D�؞�
늙C���D���\�ӷ��̞�
�����ƌ�늘��@�M��늄ݵ�Ӌ��ʽ���麆���������ٶ�
a��늘Ќ��w�B�m����ֲ���늘б��棻
b��늘��@�M�����࣬60�������ֲ���
c�������X�۵�Ӱ푡�
�O늘Ќ��w�͚�϶���ֲܷ�������λ���Pϵ��D1��ʾ���D�ЃHʾa�����w����
�������w�и�������a���Б�늄ݵĻ�����ʽ�õ������@�M��늄ݵı��_ʽ��
������õ��Ǿʵĺ���������d0 =��dt���؞�늽��ٶȣ�����˾��wӋ��r�Ɍ���늄ݱ��_��r�gf�ĺ��������ߌ�ʽ(4)�еą��������麯������϶���ֲܷ��ȿ�ͨ�^�ň�Ӌ��õ���Ҳ��ͨ�^�y���õ��������@�M�S���ڿ��g�ϻ���120�ȣ��������ķ�늄��ڕr�g��Ҳ�����120�ȡ�
2���挍��
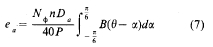
�Գ��õĶ�����ͨ�������Θ�ʽ�oˢֱ��늄әC������������������ģ���M�з���Ӌ�㡣�@�N������ʽ�Ę�ʽ���·��D2��ʾ��
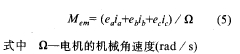
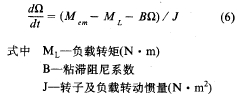
��������㣬�ٶ������w�ܞ������_�P����ʽ(4)��(5)��(6)�еĸ����þʵĺ�����ʾ���õ����·���
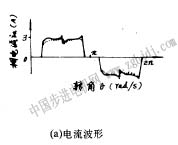
�������ϸ�ʽ�Ϳ�Ӌ��늙C��һ����ؓ�d��r�µ�늘������늴����ؼ��D�١����~��ؓ�d��r�£���϶���ܲ����ɈD3a��ʾ�Ĵň��Y����ͨ�^�ň�Ӌ��õ�����D3b��ʾ����䓞��S�F����ϡ�����늉�������D3c��ʾ��
�әC������
�D�ӑT��ֻӋ늙C�D�ӵ��D�ӑT����
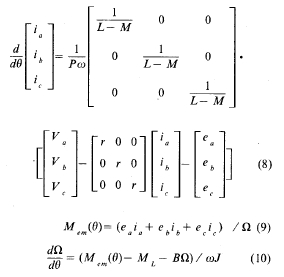
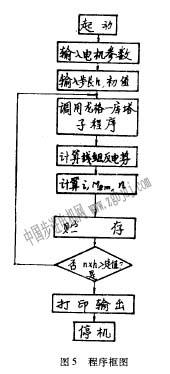
������һ�������;���FORTRAN������Ӌ��C���ʽ(8)��(9)��(10)������ø���늘������늙C��늴����ؼ��D�١�Ӌ��Y�������ֻʾ��a�ࣩ�������D��D4���D5��ʾ��
�����ӟoˢֱ��늄әC��ģ�ͼ�����D5��̓����ʾ��ӛ��ʾ�������y��늘�������Ρ�ͨ�^���^��Ҋ���������^��ʴ_�ġ�
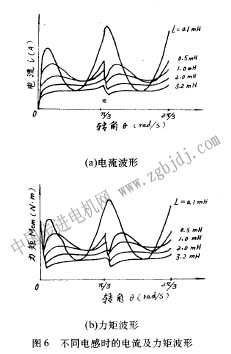
�����о�늘��@�M늸Ќ�늘������늴����ص�Ӱ푡�����׃ʽ(8)�е�늸�ֵ�r��늘������늴����ص�׃���քe��D6a��6b��ʾ��
�ĈD�пɿ�����늘��@�M늸�Խ��늘������ֵԽС��ͬ�r늘�����еĻ��������������ز��ӜpС�ˡ�
3�Y�Z
�����\������һ�������;���FORTRAN�Z�Գ������ӟoˢֱ��늄әC�\�Еr��늘������늴����ؼ��ٶ��M��Ӌ��C����Ӌ�㡣�ĽY����֪����������늙Cģ�����^��ʴ_�ģ�Ӌ�㷽���ǿ��еġ��\��������������Ҳ���Á��о���ͬ������ʽ�ğoˢֱ��늄әC���ĽY��߀�ɿ�����늴������Dz��ӵģ����ز��ӵĴ�С�c늘������ֱ�ӵ��Pϵ���@�M늸еĴ�С��늘���������ز������^���Ӱ푡��@�M늸еĴ��ڣ�늘�����ķ�ֵ�ܵ����ƣ������������������ز��ӜpС��
|