|
�����ˣ�����������x��
���㽭��W늚�̌WԺ���㽭����310027��
ժ Ҫ�����˽�Q �oˢֱ��늙C�Q���^�����D���}���^��Ć��}�������һ�N�������}�_�����{�Ʒ��������˷���ֱ���oˢ늙C�\�Еr�}�_�����{�Ʒ�����늙C�Q���D�ص�Ӱ푣�����Փ�ϣ���ֱ���oˢ늙C�������֣��ƌ���ֱ���oˢ늙C�Q���r��늴��D�ش�С�������ˮa���Q���D�ص�ԭ��ᘌ�ʹ�Â��y�}�_�����{�Ʒ����r늙C�D���}���^���ȱ�c�������һ�N�µ��}�_�����{�Ʒ���PWM-OiV�}�_�����{�ơ�������Փ���C������ֱ���oˢ늙C�����У��������PWM-ON�}�_�����{�Ʒ����a�����D���}������^С����ԇ���ʹ���˻���TMS32,OLD,8016оƬ�ľ��и߿ɿ����c���`����DSP����ϵ�y��ͨ�^����C������������}�_�����{�Ʒ�����Ч��������ֱ���oˢ늙C�Q���r���D���}�ӣ� �P�I�~�� �oˢֱ��늙C���Q���D���}�ӣ��}�_�����{�� �ЈD���̖��TP 27 �īI���R�a��A
1����
�oˢֱ��늙C�Ǿ������η�늄ݲ�������늙C������늙C�D�Ӳ������Ų��ϣ������w�eС�������p���Y�����Σ��\�пɿ���Ч�ʸߵ�һϵ�Ѓ��c�����У��oˢֱ��늙C��������ƺ��εă����ڸ����涼�õ���Խ��Խ�V���đ��á����ǣ��oˢֱ��늙C���е�늴��D���}�ӆ��}���^��Ӱ�늙C���D�ٺ��ŷ����ܣ��Ƽs�����Mһ���İlչ����ˣ��oˢֱ��늙C�D���}�ӵ����ƣ��ɞ���һ����Ҫ���о�����
ԇ��п���ϵ�y�����˵��݃x����˾****��DSPоƬTMS320LF28016��ͨ�^����C����ԓоƬ���ɵğoˢֱ��늙C�{��ϵ�y���и��`���Ժ߿ɿ��Եă��c����ͨ�^�µ�PWM���Ʒ�ʽ��Ч�������˓Q���D���}�ӡ�
2ֱ���oˢ늙C�Q���D���}�ӷ���
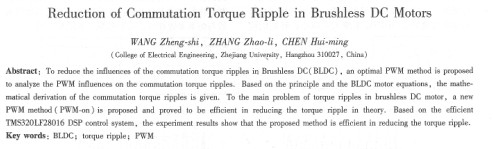
1)ֱ���oˢ늙C���Wģ����������������B��120�Ȍ�ͨ��ֱ���oˢ늙C���������·����������ʽ��׃�������·��늙C��Чģ�ͣ���D1��ʾ��
����ʹ�����������늉�ƽ�ⷽ��ʽ�������Dl�еğoˢֱ��늙C��Ч�ʸ��ܶ�������׃�Q������׃�����M���Ƽ��g�������Ӽ��g��̫��ܡ��L�ܵ�������Դ�еđ��õȷ���Ľ̌W�c���й�����
���O늙C�������Q������120�����β���늄ӄݣ������OЧ�����O�@�M���Ժͅ�����ͬ�Ҟ鳣����
늙C늴��D�ع�ʽ��
���B�r늙Cֻ�Ѓ���ͨ늣�늴��D�؞�
�oˢֱ��늙C�ڹ����r��ÿ�ΓQ�����60��늽Ƕȡ��ړQ�����g���M���P�����ϵ��_�P���ѽ��P�࣬������늙C�@�M늸еĴ��ڣ����������һ�p���㣬���Ǖ�ͨ�^�������m�����O���M���m�����S֮��˥�p���㡣�@���Ǯa���Q���D���}�ӵ���Ҫԭ���P����ķ�늄ӄݲ��Ξ�һ��б�º�������D2���D3��ʾ��
���Q���^�̺̣ܶ��������Ӌ���м��O�Q�����ge=��E��E�鷴늄ӄݷ�ֵ����
ᘌ��oˢֱ��늙C�Q������ԣ��a���˃ɷN��ͬ���{�Ʒ�ʽ��
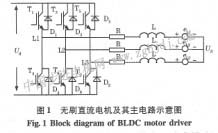
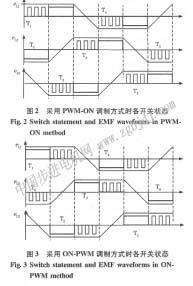
1�� ͨ���M��PWM�{�ƣ��ǓQ���_�P�ܺ�ͨ( PWM-ON)���_�P��B��Ҋ�D2��
2���_ͨ�ܺ�ͨ���ǓQ���_�P���M��PWM�{��( ON-PWM)�����_�P��B��Ҋ�D3��
����;��w������һ�ɷN��ͬPWM�{�Ʒ�ʽ���D���}�ӵ�Ӱ푡�
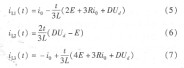
2)�_ͨ���M��PWIVI�{�Ʒ�ʽ��PWM-ON�����D���}�ӵ�Ӱ� �ԈD1���·���������O�����U���ГQ��L2�࣬�˶ΓQ�����g����Ҋ�D2��T1���P���_�P�ܣ�T1���_ͨ�_�P�ܣ���T2��ǓQ���_�P�ܡ��˷N�{�Ʒ�ʽ�����_ͨ�_�P��T3�M��PWM�{�ƣ��ǓQ���_�P��T2��ͨ���Q�����gD4��ͨ�m�����Dl��Ll�c�c�����B��늙C��늉�UL3=0��T3�M��pWM�{�ƣ�ռ�ձȞ�D��ֱ��ĸ��늉���Ud�����UL2=Ud��D;T2��ͨ��UL3=0�����У�Ud��ֱ��ĸ��늉���D��ռ�ձȡ���늙C��늉�����ʽ(1)�ɽ�ã�
�����Ll���ГQ��L2��ǰil1=i0��iL2=0������ʽ(1)�ɽ�����ÓQ���^����늙C����������̞�
����늴��D�ع�ʽ������Ӌ����Q���^���е�늴��D�أ�
�c���B늴��D��ʽ(3)��ȿɵô˕r�D���}�Ӟ�
3)�ǓQ���_�P���M��PWM�{�Ʒ�ʽ(ON��PWM)���D���}�ӵ�Ӱ푼��O���߀�Ǐ�Ll���ГQ��L2�࣬T1���P���_�P�ܣ�T3���_ͨ�_�P�ܣ���T2��ǓQ���_�P�ܡ��˷N�{�Ʒ�ʽ���ɷǓQ���_�P��T2�M��PWM�{�ƣ��_ͨ�_�P��T3��ͨ���Q�����gD����ͨ�m����늙C��늉�UL1=O��T3��ͨ��UL2=Ud��D;T2�M��PWM�{�ƣ�ռ�ձȞ�D��UL3=(l- D) Ud����늙C��늉�����ʽ(1)�ɽ�ã�
�����LI���ГQ��L2��ǰ��iL1=i0��iL2=0��iL3= -i0������ʽ(1)�ɽ�����ÓQ���^����늙C����������̞�
����늴��D�ع�ʽ������Ӌ����Q���^���е�늴��D�أ�
�c���B늴��D��ʽ(3)��ȿɵô˕r�D���}�Ӟ�
���^ʽ(9)��ʽ(15)��
����ڃɷN�{�Ʒ�ʽ�£����_ͨ���M��PWM�{�Ƶķ�ʽ( PWM-ON)�Q���D���}���^С��
3 DSP����ϵ�y�OӋ
����ϵ�y��TMS320F28016�������оƬ����Ҫؓ؟��̖�IJɼ������F�����㷨�Ϳ��Ʋ��ԣ��a�������PWM����ʹ늙C�����\�С�ͬ�r����RS232ͨ�Ř˜��c��λ�Cϵ�y�M��ͨ�š�늙Cλ����3�����b��늙C�Ȳ��Ļ����������o����̖��DSP��ͨ��I/O�ڣ�ʹ�ò�ԃ��ʽ�z�y��DSP����ͨ�^�z�y�����D��λ�ã������x��Ŀ��Ʒ�ʽ��PWM-OlN��ʽ�cON-PWM��ʽ���l��PWM�_�P��̖�����ͨ�^TMS320F28016�Ȳ���12λA/Dģ�K�z�y���D��ͨ�^�������aģ�K�z�y�������z�y��������c�D�٣�ͨ�^PI�{����Ӌ����m��PWMռ�ձȣ���ʹ늙C�����\�С�������PWMģ�K( ePWM)�o����׃���_�P��̖�����ɹ�����x����ICBT��
ʹ��TMS320F28016���ɵ�ֱ���oˢ늙C����ϵ�y����������������������·����һ�N���õ�һƬʽ��Q��������ȬF�ڏV��ʹ�õ�2407��28016��һ���ăȺ˾��и��ߵĹ����l��(60 M)���������32��32�ij˷�������������Ƀɂ�16��16�˷��������R��������a�cC������aЧ�ʴ����ߵȡ���Ч�����ܿ�����ɸ��N���s�Ŀ����㷨���҃r�����늙C�����и߶˵�2812��****���ݡ�28016�ݱ،��ɞ���һ��늙C���Ƶ�****оƬ֮һ��
4����͌��Y��
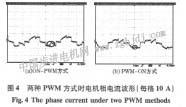
���Č��ɷN�{�Ʒ������M���ˌ����C�����ù��ʞ�1 kW��4�Oֱ���oˢ늙C����׃���������˾PS21869-P��̖��IPM������6�������30 A��늉���600 V����������Ȍ�����������M�����^�y�����ÃɷN�{�ʽ�r늙C����������Σ���D4��ʾ��(a)ON-PWWE��ʽ
���ȈD(a)�c�D(b)�ɿ���������PWM-ON�{�Ʒ�ʽ�r��������}�����@С��ON-PWM��ʽ�µ�����}�ӡ�
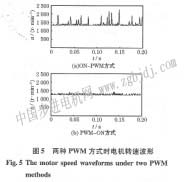
�����D�ص��}����KӰ푵���늙C���D�٣���ˣ����߀���D�ٲ����M���ˌ��ȡ�DSPͨ�^�������a�·���ٶ��M�вɘӣ�ͨ�^RS232�ӿڂ�����Ӌ��C������Ӌ��C����DSP���ɼ����Ĕ������ٶȲ��Σ���D5��ʾ��
���^�D(a)�͈D(b)������PWM-ON�{�Ʒ�ʽ�r�D�ٵ��}�����@С��ON-PWM�{�Ʒ�ʽ��
���Y���C��������PWM-ON�{�Ʒ�ʽ���Ƶ�ֱ���oˢ늙C������Ч�ؽ��͓Q���r���D���}�ӡ�
5�Y�Z
����������㷨����Ч�ؽ���ֱ���oˢ늙C���D���}�ӣ����Ҿ��в���׃Ӳ���Y����ֻͨ�^ܛ���㷨�����D���}�ӵă��ݡ�����TMS320F28016�Ŀ���ϵ�y���и�Ч�����ܲ����гɱ����ݡ�ԓ��ϵ�y�ѽ��ɹ��ؑ����ڲ��ßoˢֱ��늙C�Ĺ��I�p�x�C�У����õ������õ����ܣ���һ�Nʮ���õ�ֱ���oˢ늙C�����㷨�c����ϵ�y��
|