|
����ˣ�����늙C�о��� 710077��
ֱ��늄әC��늘��������Ҫ���x���������������S���D�أ���������늄әC�D�صĴ������oՓ��ָʾ�����ƣ������������ɺ�ҕ�����á�늘�������^�@�M�c�·�������l�ᣬ���������늙C�c�b�ð�ȫ�\�е���Ҫ���������ؓ�����c�^������o�����������b�ò���ȱ�ٵĭh������Ҋ��늘����ȡ����늙C������ʮ����Ҫ�ġ�
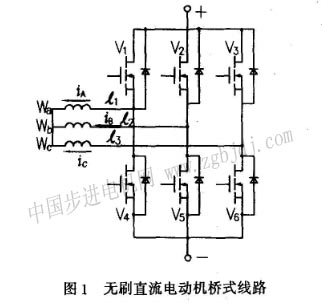
�oˢ늙C�о��β����c���Ҳ��ӣ�����ӑՓ����ǰ�ߡ��D1ʾ���������νӾ���ʽ�Ę�ʽ��·���@���Ҋ�ķ�ʽ��
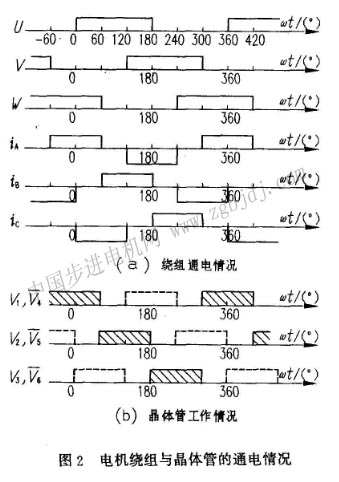
�D2ʾ���������\�Еr��ͨ���r��U��V��n���D��λ�Â�������ݔ����̖��
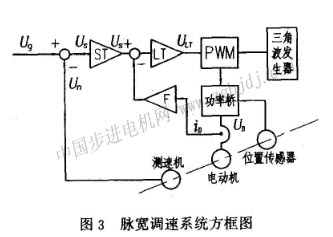
�@����þ��w���}���{�Ʒ�ʽ�M���{�����Ԍ��F늙C�{�١��D3����͵ķ���D���@��һ���������ؓ�����c�ٶ�ؓ����
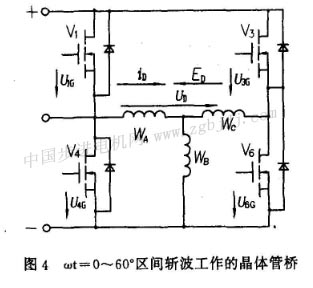
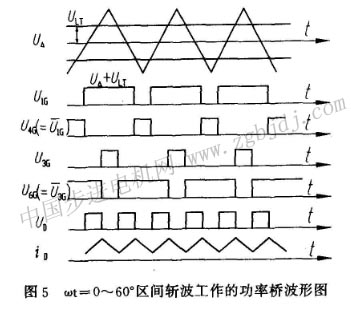
�D4��ʾ��늙C̎��(0�ȡ�60��)�^�g�����ľ��w�ܘ�(�OULT>O��늙C���D)��
�O�˅^�gWA�cWcͨ늣�늘������WA���ˣ���Wc�����������w��Vl��V3��V4�cV6̎�ڔز�������B������Ҋ�D5��
�@��UIG�����Dz�늉����c����늉�ULT��Ӻ��^���������õķ���늉���������ʾ��UA+ULT���D��UA- ULT��Ȼ��
늙C��늉�UD�����iD�IJ���Ҳ�ڈD��ʾ�����ɈD�п�֪늘�늉����}�������ڿ���늉�ULT����׃ULT�ķ�̖��UD��iD�����S֮��׃���@�ӱ㌍�F���{�١��@�M��ͨ���r׃�Qһ�Σ��ز������ľ��w��Ҳ���Qһ�Ρ����^�g���w�ܵČ�ͨ��rҊ�D2b���D�����Ӱ�^��ʾ���w�ܹ����r�ŘOʩ��U��+ULT����̓����ʾʩ��U - ULT������V4��V5��V6�քe�cV1��V2��V3ͬ�r̎�ڔز���B������ͨ�c��ֹ��r�����෴���ʈD����V1��ʾ��ע�⣬�@�H��ʾ�ز���B���Pϵ���ڷǔز���B�����w�ܾ�̎���P�࣬��UD��****ռ�ձȲ����_��********��
����ULT>O��UiG= U4G= UA+ ULT������^�g��-60�ȣ�60�ȣ���늘����iD����WA����Ulc=U4G= U��- ULT����^�g(120�ȣ�240��)��iD��WA�����������@�M�����w�ܵ���r��ơ����w�ܵČ�ͨ�^�g�Լ��ŘOʩ�ӵ���UA+ULT߀��U - ULT��ֻȡ�Q���D�ӿ��gλ�ý�f����������늽ǵ��Pϵ�ǹ̶��ģ����@�M��ͨ���r�c늽ǵ��PϵҲ�ǹ̶��ġ��Ķ����C�˶����@�M�ĺϳɴń��ڿ��gʼ�K��ǰ�����D�����D�Ӵň�90�ȣ����H����Q������ڡ�30�ȵĔ[�ӣ���
2ͨ�������õ����ȡ�ӷ�ʽ
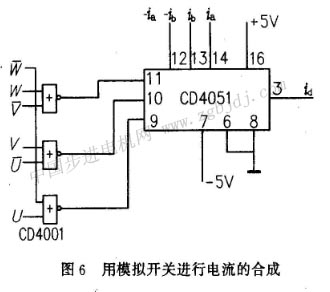
�ڈD2a�п��Կ���늙C�@�MWA. WB.Wc݆���g��ͨ늣��·���κ�һ�c���������B�m��늘������늘����ID��Ҫ���r�g���݆��ȡ�������ƴ�Ӷ��ɡ��@������߉�·����ģ�M�_�P���F�����Q�λ���x����늙C�����ϸ���һ�����������������������������������ϳɣ���ʡȥһ��������������������ݔ����������ԭ������� �_�P��ݔ��������ݔ�����B�Ӵ���늘������i�����xһģ�M�_�P���F�����ס��D6ʾ����߉�·���@Ҳ����GAL���F��
��ULT>O iD����
��ULT
�@�Nȡ�ӷ�ʽĿǰ���V�����á������f���ǟoˢֱ��늄әC****��ȡ�ӷ�ʽ�����****ֵ+����ȡ�ӷ�ʽ
�@�������һ�N���ȡ�ӷ�ʽ��
3.1 ���****ֵ��ȡ��
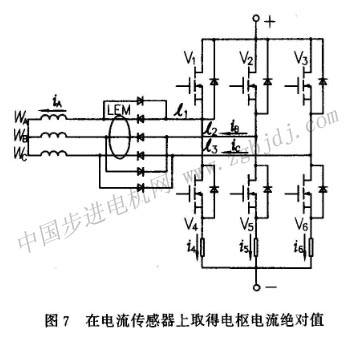
�����늙C�������˷������O�ܣ�����ͬ����O�ܵ��B��ͬ����һ�������������Ҋ�D7�������κΕr��ij���D7�������������ȡ��늘����****ֵ�ˣ���������������Č���ֻ��һ�����ұ���һ�����^���������ڂ������ĸ����õ��B�m�����ia����ֵ�cԭ�����֮�ȵ��ڂ�������׃�ȡ��@�Ǵ���늘����****ֵ��������ֱ������늙C����c�D��ָʾ���^������o������ڃH�\���ڵ�һ����ϵ�y�����o����ؓ�d�ҟo�����ƄӵĆ���ϵ�y������������������@�Nϵ�y��늙C�D��ʼ�K����ֵ�����ȡ�ӟo��ֱ����̖��
����4�����\�е�ϵ�y���tҪ��ȡ������M������
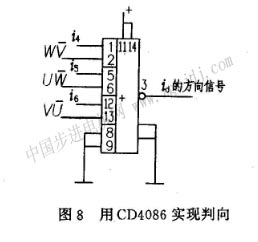
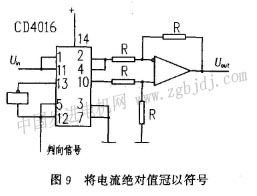
��ȡ�Ô�����14��15��16������V4��V5��V6��Դ�O��·���˵�ֵ��裬������ȡ�������������^��̎��锵���������^���������λ�����㣬��С�ֱ�������_�����������D8��ʾ����CD4086���F����
ULT>O
�څ^�g��- 60�ȣ�+60�ȣ���iA>O��i4=0���t��Vi4=0
�څ^�g(60�ȣ�180��)��iB>0��i5��0���tU Wis=0
�څ^�g(180�ȣ�300��)��ic>0��i6��0���ty Ui6=0
CD4086ݔ���顰1��
ULT
�څ^�g��-60�ȣ�+60�ȣ���iA0���t��Vi4=1
�څ^�g(60�ȣ�180��)��iBO���tU Wis=l
�څ^�g(180�ȣ�300��)��ic<0��i6>0���ty Ui6=1
CD4086ݔ���顰O��
�������ָʾ�Լ����漰��������Ŀ��ƣ���ȡULT�ķ�̖����늘�����ķ�̖���@���H�������ָ��ķ�̖���������̖�����c���H���ia�H�ڕr�g���ИO�̕��ij�ǰ�������������߉�ϵ�̎����
늙C������������ķ������O�ܣ����~�������늙C���ܳ��F�ķ�ֵ����x�����������ܷ���늉����ʿ��õ͉����O�ܡ�
3.2�ɷNȡ�ӷ�ʽ�ı��^
ͨ�������ȡ�ӷ�ʽ�ǡ���ӡ�����������ĸ�߅�����ƴ�Ӷ��ɞ�����늘��������ʽ��������ķ�ʽ���H���ö��O�ܡ���ӡ�����·�����ʹ�����������߅���F�B�m��������������****ֵ��ȡ�ØO�麆�㣬��ͻ���ă��c�����@�õ�������ε��B�m�Ժܺã������ڲ���ƴ��̎��ë�̡��@��������F֮̎��Ҳ��ͨ����ʽ���o����ȵġ�
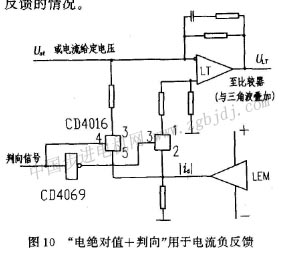
��ɲ����ϳɶ�ֱ�ӑ��ã��D10��ʾ��������̖����ģ�M�_�P��
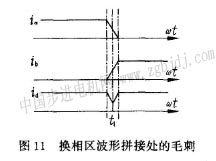
Ҋ�D11���@�����һ����խ�ēQ���^���ړQ���^�ȣ�iA��ID�����㣬ͬ�ri����O���Ӟ�ID����ͨ����ȡ�ӷ�ʽ���ړQ���^���ГQ��ȡ�õ�������O��tl�r���ГQ����ȡ�õ������i�����Q���磬�t��ȡ������ϱ���F�D����ʾ��ë�̡����ε��ГQ����l���ړQ�����_ʼ��Q�����Y����˲�g��ë�̌����������ǰ�ģ�M�_�P��������r���]�ģ����H��ģ�M�_�P���_ͨ�c�P��Ҳ�Ђ��r�g���@һ�c�������ڲ��ε�㕽ӡ��������****ֵȡ�ӷ�ʽ�t�����ڂ� ������߅�ړQ���^��Ӳ���ГQ�����nj�ݔ��늙C������늙Cݔ���������������������������@�c������������ˢֱ��늄әC�����ȡ�ӣ������Կ����ړQ���^����Ȼ�Ͳ�����ë���ˡ�
�@һ��ʽ��ȱ�c������·Ҫ������O�ܣ��������ӵĉ����c�p�ġ���늘�����^��r������ɺܴ�IJ��㡣����߀Ҫ�M�������c��̖�ϳɡ�
�@һ���ȡ�ӷ�ʽ�m����늘������̫���늙C�������m���ڟo������Ĉ��ϡ�
���****ֵ�����ȡ�ӷ�ʽ���������a��160LW�oˢֱ������늄әC�����Ȳ��á����õĕr�g�в��L���д����ڌ��`����u���M���Mһ�����ơ�
혱�ָ��������ͨ�������ȡ�ӷ�ʽ�������ڵIJ����ϵ�ë�̣����h�����c���****ֵȡ����Ƶķ�����Q��
����ˣ��У�1940��lI�³�����****���̎�����Ҫ����ֱ������ˢ���oˢ��늄әC���������M늄әC����������ֱ�����M늄әC�������о���
|