|
��־������ ��
���������պ����W�x���ƌW�c��늹��̌WԺ������100191��
ժҪ��ᘌ���ǰ�i���ٶȿ������ą������������ԇ��ԇ���ķ�ʽ���˹��M�Ѓ����������һ�N�Կ첶����Ŀ�˺������i���ٶȿ���������ρȺ�����������ԡ�������Ŀ�˺������ƌ���ρȺ�㷨�i���ٶȿ����������������������o�������㷨�ľ��w���F���E�����ԓ�����������ڴőҸ������������ݵĸ��ٟoˢֱ��늙C�ٶȿ��ơ������о�������ԓ�i���ٶȿ����������������Ծ��к����m���ԡ������ݣ��M��ͨ�^�����C��ԓ�����Ŀ����Ժ���Ч�ԡ�
�P�I�~��ρȺ�㷨���i���ٶȿ��ƣ��������������� �oˢֱ��늙C���őҸ������������� �ЈD���̖��TM36 +1 �īI��־�a��A ���¾�̖��1001-6848��2010��06-0054-05
0�� ��
��늙C�{���I���i���ٶȿ��Ƽ��g�ڸ߾����ٶȿ��Ʒ�����Ъ��صă��ݣ���늙C�ķ�����̖�ͅ����l����̖ͬ���r���D�ٵķ��B���ȿ��_�ٷ�֮0 1~0. 02���h���ڂ��yPID���ơ�늙C�i����Ƶ��о����c�Ǹ��ƄӑB���ܺͿ��ɔ_���ܣ����в����pģ�ٶȿ��Ʋ��H�������b�����ķǾ��Թ����^�������܉�@�����õĄӑB���ܺ��^�ߵķ��B���ȡ��īI[2]����ģ�ͅ������m����Փ�ӑB�{���i��h�h·���棬�ӿ����ܵ�ؓ�d�D�ظɔ_�r늙C�D�ٵĻ֏��^�̣�����˷��B���ȺͿ�ؓ�d�_�ӵ������������Л]�о��w�o���b�l�b������͵�ͨ�V�����r�g�����ȭh·�������������������i��h�ĭh·�������x���h·������ӰH���^���ڌ��H�����У�һ�����ԇ��ԇ���������������@���\�Р�r���m���Բ��ܱ��C����ˣ��о��͌����i��������������Ԅ������̓������������m�����s�Ĺ��r��ָ�˵Ŀ���Ҫ�ɞ��i���{�ټ��g���õ���Ҫ�n�}��
ρȺ�㷨����M��Dorigo�������һ�Nȫ�µ�ģ�M�M���㷨���ڽ�Q�����̆��}�����η��䆖�}
���ٟoˢֱ��늙C�i���D�ٿ���������ρȺ������־�����ȵȑ����б��F���ஔ�õ����ܣ�ԓ�㷨���������������C�ƺ͆��lʽ���ԣ����������ԏ����m�ڲ���̎������һ�㺯���������}���܃����������B�m���������ֲ��Oֵ�c�ܼ��ĺ�����ͬ�Ӿ��кܺõČ������������������һ�N����ρȺ�㷨���i���ٶȿ������Ԅ��������������������o���˾��w�ă������E�������о�������ԓ�i���ٶȿ����������������Ծ��к����m���Ժ������ԣ����ڴőҸ��������������ø������şoˢֱ��늙C�ϵ���C��ԓ�����Ŀ����Ժ���Ч�ԡ�
1���}����
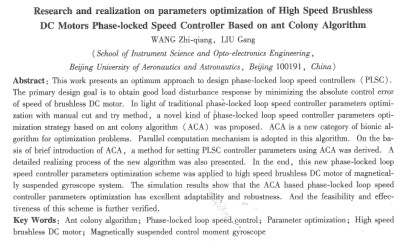
�i��늙C�ٶȿ���( PLSC)ϵ�y��Ҫ���b�l�b����( PFD)���h·�V����(LPF)��������ʎ��(vc0)���������������M�ɣ���D1��ʾ�����У�����P�I�IJ������b��������ݔ��һ��ʬF���Ǿ��Ե����ԣ�ֻ���i��h�ӽ��i���r�ųʬF���Ա������ԡ���늄әC�i���{��ϵ�y�У����D�ؿ�������늄әC��늴a�Pȡ��vc0��늄әC��ݔ���D�ٽ���늴a�P������D��λ�Â������D�����c늄әC�D���D�ٳɱ������}�_��̖��PFD���^����ݔ���}�_��̖�c��늴a�P������D��λ�Â�����ݔ�����}�_��̖����λ��
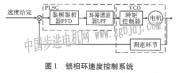
늄әC�ĄӑB����ʹ�i���{��ϵ�y�ɞ������i��h��һ�A��ϵ�y����ӑB����ʹ�i���{��ϵ�y�����ܺ�Ҫ�����c����i��h�������@�IJ�ͬ���c����i��h��ȣ��i���{��ϵ�y�r�g�������l�ʵ͡��{�ٷ���������늄әC���ڴ�ęCе�T����ʹϵ�y�Ď���׃խ��ϵ�y�ĕr������������i��hҪ��ö࣬ϵ�y���y���l�ʠ����������i����˱��IJ����pģ�ٶȿ��ƣ�ϵ�y�Y����D2��ʾ�������ٶȿ��������D�ؿ������ɲ��֡�
�ٶȿ������ЃɷNģʽ��PID���ƺ��i����ơ����ٶ��`���****ֵ�����A���O�����`��r��ֻ���ٶ�PID�������ã�ʹ늙CѸ�ټ��ٻ�p�٣����в������īI[ 9-11]��PIDρȺ�����㷨���ٶ�PID�������M�Ѕ������������ٶ��`���****ֵС���A���O�����`��r���D���i�����ģʽ���ڷ��Bֻ���i��������ã�ʹϵ�y�@�øߵķ��B���ȡ�PLSCϵ�y���b�l�b���A�εĔ��Wģ�͞�
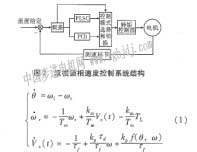
ʽ�У��Ȟ���λ���d�ͦ�f��V���r�g������w1�酢����̖�l�ʣ�wr��늙Cݔ���D�٣�ka��h·���棬km��늙C�C늕r�g������kp��PFD���棬Tm��Cе�r�g������T��늙Cؓ�d�D�أ�K(f)��V����ݔ����
���pģ�ٶȿ������\�����i����Ʒ�ʽ�r��PFD�ʾ��Ա������ԣ��˕r���գ�m���ľ���ģ�͞�
ʽ��w���l�N��a�P�Ĺ���ܶȻ�늙C�O�����c�D��λ�Â����������ij˷e��
����֪늙Cģ�ͺͲɘ����ڵ���r�£�늙CPLsC��Ҫ��3�������M�Ѓ����������քe��PFD���棬�V���r�g�������t��ʹ�ÿ���ϵ�y��ijһ����ָ���_��****��PLsCϵ�y������ָ�˿����i�����i��h����̎��������B���������i��h��ʧ�i�����i���������i��h�ɿ������i���������u�r��
��ʧ�i��B�£���ʹ�h·���l�ʠ�������K�i����****�l��Q�鲶������ʹ�i��h·����λ�`���һ��׃�����ڷ��������i��****�l��Q��첶���������i�����i��h·�������ӵ��l�ʲ����С���t�h·��̎���i���B��ֻ�����l�ʲ�����ij����ֵ�h·�ŕ�ʧ�i���i��h�܉��i���B�����S��****�l�ʲ�Q��h·��ͬ���������i����B�£�ϵ�y���S��****���B��λ�`���c���H�ķ��B��λ�`���****ֵ֮����x���i��ϵ�y���b��ԣ�ȡ�
PLSC�ýy�����l����
������ͨ���ÿ첶�������u�r�i��늙C�ٶȿ���ϵ�y���ܵ�¶Ҫָ�ˣ�
�O�i���{��ϵ�y�ڳ�ʼ�r��̎��ʧ�i��B��늄әC�D�ٞ�ئӣ���늴a�P���D��λ�Â������ķ����l�ʣ�������̖�c������̖�g������� (t)=���ئ�+�� o���Ȟ��ʼ��λ������b�l�A�Σ������b�������b������b������ݔ��늉��Ǖr�gt����X���κ����Pϵ����ֵ��21���l�ʞ����0�b�l�b����ݔ��늉���̖�ķ�ֵ��
vֵ������늄әC�D�ؽo��ֵ��늙C�D������ֵ�飺
��ˣ���ʽ(4)��ʽ(5)�ɵã�
ֻҪ늄әC�D���`����^�첶�����i��ϵ�y����һ����λ�����ڃȿ������i��늄әC�D�ٲ��Ӻ�С����늄әC���{�ٷ����^���r���Ɍ��{���������A��ʽ���֣�ֻҪ�A�ݲ����^�D�ٿ첶����ϵ�y����ƽ���������i��
Ŀ�˺������M��ρȺ�㷨����������������ACA_PLSCϵ�y�ڝM�㷀���l���ļs���£����첶������Ŀ�˺����M�Ѕ���������
2 ACA_PLSC��������
2.1ρȺ�����㷨
ρȺ�㷨�������£�
���ij��ʾ�r��f��·���������е���Ϣ�������|�ĝ�ȣ��ڕr��fÿֻΛρ��Ҫ�x����һ��Ҫ���_��Ŀ�˹��c������t+l�r�̵��_ԓĿ���c���ڕr�g�^�g(t��t+1)��mֻΛρ�����һ���D�ƷQ��ρȺ�㷨��1�ε��������^n�ε�����ρȺ�е�ÿֻΛρ�����һ�η���Ҏ�ɵ����У��t�QρȺ�㷨���1��ѭ�h���˕r����Ϣ�������|�ĝ�Ȱ����¹�ʽ������
ʽ�У�p��ʾ��Ϣ���ؓ]�lϵ����p��[O��1����(1-p)��ʾ��Ϣ���ؚ������ӣ���f2���kֻΛρ�ڕr�gt��t+l֮�gጷ���·���ϵ���Ϣ�������|�Ĕ�����Ҏ���ڕr��t=0��Ϣ�������|�ĝ�Ȧ�ij (O)��һ����С��������Q�鳣����Lkȡ���AֻΛρ�ڱ�݆ѭ�h�е�Ŀ�˺�����׃������Ŀ�˺�����׃�����а�����Λρ�����^�����й��c���Ż���ϵ�y��ǰ����ָ�˵�׃����Ϣ��
����ʹÿֻΛρ�L�����в�ͬ��Ŀ�˹��c�H1�Σ���Ҫ���xһ�����ɱ픵���Y�������д惦(0��f)�r��ÿֻΛρ���L����Ŀ�˹��c�Լ��ڸ���Ŀ�˹��c֮�g�����^��·�̣�����ֹԓΛρ�ٴ��L���@ЩĿ�˹��c����1ֻΛρ���һ�η���Ҏ�ɵ����к��ɱ��ɱ��Á�Ӌ�����Į�ǰ�⡣��tab��ʾ��AֻΛρ�Ľ��ɱ���kֻΛρ��Ŀ�˹��ci��Ŀ�˹��cj�D�Ƶĸ��ʞ�
����ǰ�ѽ���������Ŀ�˺���****ֵ�IJ�ֵ���錦�����c��Ŀ�˺�����****ֵ��
2.2 ACA_PLSC�����������E
����ρȺ�㷨�@ȡ****PLL�����IJ��E�ɚw�{���£�
1)�����l���OӋ��Ӌ���PLL����kp0��Td0��fm�Լ�ϵ�y������ָ��F0��
2)�O��Λρ��m�����oÿֻΛρ�䶨�xһ������m��Ԫ�ص�һ�S���MNodek����Nodek�����˴�ŵ�kֻΛρҪ���^��m�����c��ֵ���Á���ʾ��kֻΛρ������·����
3)��׃��i=1��ѭ�h�Δ�N=0���O��****ѭ�h�Δ�Nmax�Լ���ʼ�r�̸����c����Ϣ���صĝ�Ȍ�ȫ��Λρ��������ʼ�c���O�����Ɨl����
4)����ʽ(8)Ӌ���@ЩΛρ��L��ÿ�����c�D�Ƶĸ��ʣ������˸��ʣ�����ـ݆�x����ÿֻΛρk(k=l��2��3������m)�ھ���l�����x��1�����c������Λρk�Ƶ�ԓ���c��ͬ�r��ԓ���c�Ŀv����ֵ����Nodek�ĵ�i��Ԫ���У���i��15���^�mѭ�h����t������ΛρA�����^��·���������MNodek������ʽ(1)Ӌ��ԓ·��������PLL����k��L��0����Ӌ���ϵ�y������ָ�˺�Ŀ�˺����������汾݆ѭ�h�е�****·���͌�����PLL������
5)ѭ�h�����Δ���l��������ʽ(7)~ʽ(9)����ÿ�����c����Ϣ�������|�ĝ�ȣ���Nodeu�е�����Ԫ�����㡣��ѭ�h�Δ�С�ڢ���������ρȺ��δ�Ք�����ͬһ�l·�����t�ٴΌ�ȫ��Λρ������ʼ�c���D����4�����У�������ρȺ���Ք�����ͬһ�l·���tѭ�h�Y����
3�����ԇ�
3.1 ACA_PLSC����
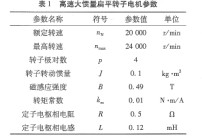
���Č�����ρȺ���������㷨�OӋ��****�i���ٶȿ��Ʒ������ڴ����a�����߾��ȡ��L�����ˑB���ƈ��ЙC�������őҸ������������ݸ��ٴ�T����ƽ�D��늙C���ӿ��ƣ���Ҫ���gָ��Ҫ�˷Q�DŽ���200 Nms�������D��20 000 r/min���D�ٷ����Ȱٷ�֮0.1����늙C���ÿ��ı���ϡ�����şoˢֱ��늙C����1�o����ԓ���ٴ�T����ƽ�D��늙C������
��ԓϵ�y�M��Ӌ��C���档�ڷ��挍��У�ȡϵ�y����ݔ������20 000 r/min��p=0.8������12ֻΛρ��
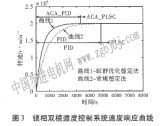
����ρȺ�㷨�@�õ�****�i���ٶȿ����������飺Kp=0 871��Td=0 022��Tf=0.004���˕r��ϵ�y��푑�������D3��ʾ��
�D3�У�����1�����ρȺ�㷨���i���pģ�ٶȿ���ϵ�y������2����ó�Ҏ�����������i���pģ�ٶȿ���ϵ�y��
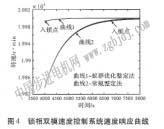
�D4�У�����l�����ρȺ�㷨���i���pģ�ٶȿ���ϵ�y������2����ó�Ҏ�����������i���pģ�ٶȿ���ϵ�y��
����Y������������ρȺ�㷨���i���pģ�ٶȿ���ϵ�y���_�����i�c���i���^���^֮����ԇ���������i���pģ�ٶȿ���ϵ�y�@���ӿ죬���ҷ��پ��ȸ��ߡ�
3.2 ACA_PLSCϵ�yԇ�
����DSP TMS320F2812����ĵ��������şoˢֱ��늙C���ֿ���ϵ�y����ܛ�����F��ACA_ PLSC�㷨��늙C���ӷ�ʽ�������ͨ��������B���i����������ٶȷ�����̖�ɻ����D��λ�Â������ṩ�������ϵ�3�������D��λ�Â���������ÿ���g��늽Ƕ�120�ȷ��ã��D��4���O����N=12���`���****ֵ�����A���O�����`��r��ֻ���ٶ�PID�������ã�ʹ늙CѸ�ټ��ٻ�p�١����ٶ��`���****ֵС���A���O�����`��r���D���i�����ģʽ���ڷ��Bֻ���i��������á�
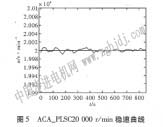
ԇ�����խh�����M�У���նȞ�0 1 Pa��ϵ�y�\�еĜضȷ�����- 40~ 120���档�D5���M���l���i���őҸ��������������ø��ٴ�T����ƽ�D�����şoˢֱ��늙C20 000 r/min�r��ACA_ PLSC����������
�D5��ʾ��ԇ�Y���������~���D�����D�ٷ����ȃ��ڰٷ�֮0. 1��
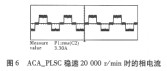
�D6��őҸ��������������ø��ٴ�T����ƽ�D�����şoˢֱ��늙C��ACA_ PLSC������20 000r/rmn�r����������Ρ�
4�YՓ
��Փ�����͌���о���������������Ļ���ρȺ�㷨��PLSC����������������Ч���еġ�ρȺ�㷨�������Ρ������ԏ�����һ�NЧ�ʺܸߵČ�����������PLSC�������������뷽���������ԇ�Y��������ACA_PLSC�������������@���ӿ����D�ٵ��i���ٶȣ����Mһ������˷��پ��ȡ�
|