�C��ֱ���h(hu��n)��(ji��)��׃���(q��)���oˢֱ��늙CBLDCM�Ŀ������O(sh��)Ӌ
�R����
�������Ƽ���W늚��c���ƹ��̌WԺ������710054��
ժҪ������(j��) �oˢֱ��늙C( BLDCM)���}���{(di��o)��(PWiVI)���c���C��ֱ���h(hu��n)��(ji��)��׃��(RDCLI)�Ĺ���ԭ���������}���{(di��o)�ƌ��ü���оƬ�͏��s�ɾ���߉����( CPLD)���O(sh��)Ӌ�����Ͳ�(li��n)�C��ֱ���h(hu��n)��(ji��)ܛ�_�P(gu��n)��׃���(q��)�ӟoˢֱ��늙C��PWNI����������(sh��)�ַ���͌��Y(ji��)���������O(sh��)Ӌ�Ŀ��������F(xi��n)���C��ֱ���h(hu��n)��(ji��)��׃�������������͟oˢֱ��늙C��PWM�{(di��o)���\�С� �P(gu��n)�I�~���oˢֱ��늙C���C��ֱ���h(hu��n)��(ji��)��PWM��������
�ЈD���̖��TM36 +1; TM302 �īI��־�a��A ���¾�̖��1001-6848( 2010)06-0059-04
0�� ��
�oˢֱ��늙C( Brushless DC Motor��BLDCM)�����w�eС�������p��Ч�ʸߡ����Ժá�푑�(y��ng)��ȃ�(y��u)�c���õ��ˏV����(y��ng)�á�Ȼ�����oˢֱ��늙Cͨ������Ӳ�_�P(gu��n)��׃���(q��)�ӣ�Ӳ�_�P(gu��n)��׃����ϵ�y(t��ng)Ч���^�ͣ��_�P(gu��n)������늉��������(y��ng)�����_�P(gu��n)�����_ͨ���P(gu��n)��˲�g��늉������������ʹ�������\��܉�E������ȫ�����^(q��)���Ķ������_�P(gu��n)�����ēp�ģ�Ӱ�ϵ�y(t��ng)�Ŀɿ��ԡ���ˣ�Ӳ�_�P(gu��n)��׃�����ص�Ӱ���BLDCMϵ�y(t��ng)���ܵ��Mһ��������
�C���A���h(hu��n)��(ji��)ܛ�_�P(gu��n)��׃��( ���QRDCLI)����һ�N��Ч�Ľ�Q;�����о��Ѯa(ch��n)���S���ؓ�Ϳ��Ʒ��������@Щ�ؓ��Դ���һЩ���㣬�T���_�P(gu��n)�������늉���(y��ng)���^�ߡ����Ʊ��^���s��ֱ��ĸ�����c늉�ƽ�↖�}�ȡ�
�īI[5]�����һ�N���Ͳ�(li��n)�C��ֱ���h(hu��n)��(ji��)ܛ�_�P(gu��n)��׃�·��ԓ����ܛ�_�P(gu��n)׃�Q�·�����@Щ��(y��u)�c��
���C��W(w��ng)�j(lu��)�o�C���ֵ���ƣ�
���C���^�����õĕr�g�^�̣����Ĺ����^С��
����׃����m(x��)�����O�܌��F(xi��n)��ܛ���P(gu��n)�࣬�˷��˷���֏͆��}��
�ܿ��Ԍ��F(xi��n)PWM�����ҷ������Σ����ڹ��̌��F(xi��n)��
��ʡȥ�������h(hu��n)��(ji��)�Ĵ���ݣ��o���c�λ��ƽ�↖�}��
�����������������_�P(gu��n)��(y��ng)����
����׃���_�P(gu��n)����������늉��_�P(gu��n)( zvs)���C���Ԫ���_�P(gu��n)����������zvs��������_�P(gu��n)(zcs)��
�īI[6]�����ԓ�����C��ֱ���h(hu��n)��(ji��)��׃���ڟoˢֱ��늙C��(y��ng)���еĿ��Ʋ��ԡ��������īI[5-6]���о����A(ch��)�ϣ�̽ӑԓ�����C��ֱ���h(hu��n)��(ji��)��׃���ڟoˢֱ��늙C�Б�(y��ng)�õ�PWM���������F(xi��n)��
1�����C��ֱ���h(hu��n)��(ji��)ܛ�_�P(gu��n)��׃��
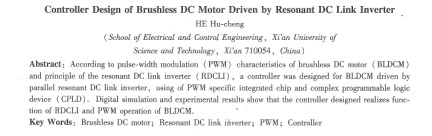
�����C��ֱ���h(hu��n)��(ji��)ܛ�_�P(gu��n)��׃�����ؓ��·��D1��ʾ������ֱ���Դ���C���Ԫ������늉�Դ��׃����늙C��
���˱��ں��m(x��)�������Ⱥ��ν�Bܛ�_�P(gu��n)��׃���Ĺ���ԭ������׃���^�ɠ�B(t��i)�ĵ�Ч�·��D2��늉�������ą���������D�И˶����D3����׃����B(t��i)�^�����gһ���_�P(gu��n)���ڵĄ������Σ��D��dUl��dU2��dU3�քe���o���_�P(gu��n)V1��V2��v3���(q��)����̖��uc�����Cr�ɶ˵�늉�����ֱ���h(hu��n)��(ji��)��ֱ��ĸ��늉���ucl��uc2�քe�����C1��C2�ɶ�늉���i���C��늸����������ԴI0���Чؓ�d�����TD/���Ч�m(x��)�����O�ܡ������C��ֱ���h(hu��n)��(ji��)��׃����һ������PWM�_�P(gu��n)������ʮ���A�Θ�(g��u)�ɡ�
�ٶ��@���·�ij�ʼ������B(t��i)��V2��V3���_��V1��ͨ���ԴE��(j��ng)V1��ؓ�d�ṩ�����
ģʽb[t1-t2]
t=t2�r��PWM�P(gu��n)����̖��������zvs�l����ֱ���P(gu��n)���_�P(gu��n)V����ͬ�rzcs�l�����_ͨV3��
ģʽc[t2~t3j
T=t2�r��ֱ��ĸ��늉��C���½����㣬ؓ�d���I0���^�m(x��)�����O��TDi��ͬ�r������O��D1�Č�ͨ����ֹ���C����M�У���ݲ��ܷ����늣�늸�L1���_�P(gu��n)��V3�Ͷ��O��D1���γɻ�·��ʹ늸�������ֵ���˕r��zvs�l����ܛ�P(gu��n)��V3��늸к����C1�l(f��)���C�����C1�����늉����ߣ�늸�����½���
ģʽ(l[t4~t3]
t= t3�r���C����ֹ��늸�����D(zhu��n)�Q�����O��D2�����Դ����������ʹ늸����Ѹ�ٜp
С���㡣
ģʽe[ t4~��]
��t4 - t5�A�Σ���׃���m(x��)�����O�ܺ�ؓ�d�����(g��u)�ɻ�·���͂��y(t��ng)����׃��������B(t��i)��ͬ����t2-t3�A��ֱ���h(hu��n)��(ji��)늉����㣬��׃���_�P(gu��n)�����������һ��zvs�_�P(gu��n)�^�̣����_�P(gu��n)�^�̽Y(ji��)�����M��ĸ��늉�������
ģʽ5[t5~ t6]
t=t5�r��zcs���_ͨV2���t늸�������������ӣ���ͨ�^��׃���_�P(gu��n)��ؓ�d��늣�ʹ���^�m(x��)�����O�ܵ�������ԜpС��
ģʽt[ t6~t7]
t= t6�r��늸������ؓ�d���������^�m(x��)���ӣ�ʹTDiܛ�P(gu��n)�ࡣ늸����һ���ֺ�ؓ�d�������ƽ�⣬��һ����ʹ��늸к����Cr��C1�l(f��)����Ȼ�C�����Cr늉����������C1늉��½���
ģʽh[t7~t8]
���C���^���У�ֱ��ĸ��늉��������Դ늉��£���t=t7�r�����O��D6��ͨ��������ֱ��ĸ��늉��ı�һ�����ӡ��˕r��zvs�_ͨV1��ͬ�rzvs�P(gu��n)��V2��늸��c���C2�l(f��)���C��ʹ���C2��늡�
ģʽj(lu��)[t8~t9]
t=t8�r��ʹ�ö��O��Ds��ͨ��늸����Դ���ܡ�늸��������ؓ�d����r�������^�̽Y(ji��)����
ģʽj(lu��)[t9��t1O]
t=t9�r�����O��D6�P(gu��n)�ֱ࣬���Դ��(j��ng)V����ؓ�d�a�������ֱ��k(t)=0���˺�ؓ�d���ȫ�����Դ�ṩ��
��t=t10���r��늸����i(tlo) =0���·��B(t��i)�ֻص�ģʽa�����һ��PWM�\�С�
2 RDCLI�(q��)�ӟoˢֱ��늙C��PWM����
�oˢֱ��늙CPWM�{(di��o)�ƿ��ƵČ��|(zh��)���Ը����飺PWM�{(di��o)�ƌ�ͨ�A�Σ�ֱ���Դͨ�^��׃����늡��C��ݔ������늙C��������ӣ�늴��D(zhu��n)�����ӡ�PWM�{(di��o)���P(gu��n)���A�Σ��oˢֱ��늙Cͨ�^��׃�����m(x��)�����O���γ��m(x��)����·����늘з�늄ݵĴ���ʹ��늙C������pС��늴��D(zhu��n)�pС��
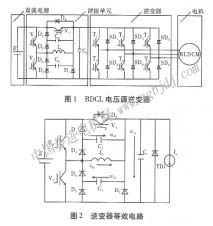
���˫@�ßoˢֱ��늙C��PWM�{(di��o)�����ԣ��C��ֱ���h(hu��n)��(ji��)�(q��)�ӟoˢֱ��늙C��PWM�{(di��o)���㷨��D4��ʾ��������׃��H��ɟoˢֱ��늙C�ēQ��ܣ����M��PWM���l�{(di��o)�ơ�
PWM��̖�½��أ�ֱ���P(gu��n)���_�P(gu��n)v������ͬ�r�_ͨ�_�P(gu��n)V1���t���C��ֱ���h(hu��n)��(ji��)��׃���Ĺ���ԭ����֪��ֱ���h(hu��n)��(ji��)늉����C���㲢���֞��㣬늙C���ͨ�^��׃���m(x��)�����O���γ��m(x��)����·�������x��1��ͨ�^�ɷN��ʽ���F(xi��n)��һ�N��r����ƣ�V1�ܵČ�ͨ�r�L�̶�����һ�N��O(ji��n)�y���ƣ��z�yֱ���h(hu��n)��(ji��)늉�����ֱ���h(hu��n)��(ji��)늉��½�������P(gu��n)��V3��
PWM��̖�����ؕr��ֱ���_ͨ�_�P(gu��n)V2���t�ɹ���ԭ����֪��ֱ���h(hu��n)��(ji��)��f���C��ֱ���Դ늉���֮���_ͨ�_�P(gu��n)V����ͬ�r�P(gu��n)��v7���tֱ���Դͨ�^V1��늙C��ݔ��ܡ������x��2ͬ�ӿ�ͨ�^�ɷN��ʽ���F(xi��n)��
3 RDCLI�(q��)�ӟojֱ��늙C��PWM���������F(xi��n)
3.1����������
���ȣ�������Ҫ�ܸ���(j��)�oˢֱ��늙C��λ�÷�����̖���F(xi��n)늙C�������Q�ࣻ��Σ�Ҫ���F(xi��n)�C��ֱ���h(hu��n)��(ji��)�������\�У����Ҫ�܌��F(xi��n)�oˢֱ��늙C��Ӳ�_�P(gu��n)��ܛ�_�P(gu��n)��׃���(q��)���µ�PWM���ơ�
3.2ϵ�y(t��ng)�O(sh��)Ӌԭ��
����(j��)�oˢֱ��늙C���C��ֱ���h(hu��n)��(ji��)�Ĺ���ԭ�������Ĵ_������D5��ʾ�Ŀ��ƿ�D����׃���������C��ֱ���h(hu��n)��(ji��)�ؓ䣬�����_�P(gu��n)�����x����MOSFET�������·������Ҫ��оƬSC3525��CPLD��ɣ����F(xi��n)PWM�{(di��o)�ơ��r����ƺ͓Q��߉�C�ϵȡ��(q��)���·�x����IR2130��IR2103оƬ���oˢֱ��늙C���~��늉�24 V���O��(sh��)��4��
3.3�����·�O(sh��)Ӌ
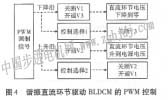
�����·��PWM��̖�ɼ���оƬSG3525���F(xi��n)��SG3525���l�ʹ̶��ļ����}���{(di��o)��оƬ����(n��i)���ɻ���늉�����ʎ�����`��Ŵ��������^����PWM�i��������������Ƿ늉��i������ݔ������ܛ���Ӽ��P(gu��n)�]�·�ȽM�ɡ��}���{(di��o)���·��D6��ʾ��R1����늙C�D(zhu��n)�ٵ��O(sh��)����R3�_��ϵ�y(t��ng)��PWM�l�ʡ�
PWM�{(di��o)�ơ��r����ƺ͓Q��߉�C�ϵ���MAX7000Sϵ������EPM7128SL84��ɣ��Ɍ�ܛ�_�P(gu��n)�\�С�Ӳ�_�P(gu��n)�\�С�ͣ܇�Լ����o��̖�M��߉̎����ݔ����׃������(y��ng)�_�P(gu��n)�����Ŀ�����̖��
3.4�������ĕr�����
��r��C�O(sh��)Ӌ�����_�ԣ���MAX+ PLUS��h(hu��n)�����M���˷��档ܛ�_�P(gu��n)�\�Р�B(t��i)�ķ��沨����D8��ʾ���ɈD��֪����/ssw��̖���F(xi��n)ؓ�}�_����׃�������̖T1��T2��T3��T4��T5��T6�����ړQ���l�ʣ���PWMO��̖�������أ�V2������̖���F(xi��n)һ�Εr�g�ĸ��ƽ����V2׃�Ͷ�ͬ�rV1׃�ߣ���PWMO��̖���½��أ�V1������ֱ̖��׃?y��u)���ƽ��ͬ�rV1׃?y��u)���ƽ�����m(x��)һ�Εr�g������PSEL����ƽ������PWMO�yԇ��̖��PWMI��
Ӳ�_�P(gu��n)�\�Р�B(t��i)�ķ��沨����D9��ʾ���ɈD��֪����HSW��̖���F(xi��n)ؓ�}�_����׃�������̖T1��T2��T3��T4��T5��T6������PWM�ز��l�ʣ�V1��V2��V3������̖������ƽ�������·���ö̽Ӿ����_�P(gu��n)����v1�̽ӣ��t�˕r�oˢֱ��늙C���\�����p�ط�ʽ������PSEL����ƽ������PWMO�yԇ��̖��PWM1��PWM2�Ļ�
�����Y(ji��)�����A��Ҫ����ȫһ�£��f�����O(sh��)Ӌ�����_�ġ�Ȼ����MAX+ PLUS��h(hu��n)�����������d������C���������ܡ�
4���Y(ji��)��
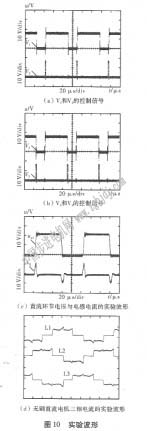
���Y(ji��)����D10��ʾ�����У��DIO(a)�͈DlO(b)�o����l5 kHz�_�P(gu��n)�l�ʕrֱ���h(hu��n)��(ji��)�_�P(gu��n)�����Ŀ�����̖���c�C��ֱ���h(hu��n)��(ji��)�Ĺ���ԭ������(sh��)�ַ���һ�¡�
�D10(c)��20 kHz�_�P(gu��n)�l�ʕrֱ���h(hu��n)��(ji��)늉��c늸�����Č��Σ��ɈD��֪��ؓ��늸����ʹֱ���h(hu��n)��(ji��)늉��C���㣬����늸����ʹֱ���h(hu��n)��(ji��)늉��C�����Դ늉������������C��ֱ���h(hu��n)��(ji��)��׃���Ĺ���ԭ����
�D10(d)����WT3000�y�õğoˢֱ��늙C������Σ��IJ����п��Կ������oˢֱ��늙C����������^�ã���ȫ���O(sh��)������������B(t��i)120���\�У��f�����O(sh��)Ӌ�Ŀ������ǿ��еġ�
5�Y(ji��)Փ
����CPLD��SG3525�O(sh��)Ӌ���C��ܛ�_�P(gu��n)��׃���g(sh��)��(y��ng)���ڟoˢֱ��늙C�(q��)��ϵ�y(t��ng)��PWM��������ʹ��MAX +PLUS��?q��)�CPLD�����F(xi��n)���C��ֱ���h(hu��n)��(ji��)��׃���Ŀ��ƹ����M���˷���ܛ������͌��Y(ji��)�����C��ݔ�����η�(w��n)�������_��CPLD��ʹ��ʹ�����������·���ξo����푑�(y��ng)�ٶȿ졢�{(di��o)ԇ����ͼ��ɶȸߵ����c��
|